|
OpenCV 4.14.0-pre
Open Source Computer Vision
|
Loading...
Searching...
No Matches
|
OpenCV 4.14.0-pre
Open Source Computer Vision
|
Prev Tutorial: Detection of ArUco boards
Next Tutorial: Detection of Diamond Markers
ArUco markers and boards are very useful due to their fast detection and their versatility. However, one of the problems of ArUco markers is that the accuracy of their corner positions is not too high, even after applying subpixel refinement.
On the contrary, the corners of chessboard patterns can be refined more accurately since each corner is surrounded by two black squares. However, finding a chessboard pattern is not as versatile as finding an ArUco board: it has to be completely visible and occlusions are not permitted.
A ChArUco board tries to combine the benefits of these two approaches:
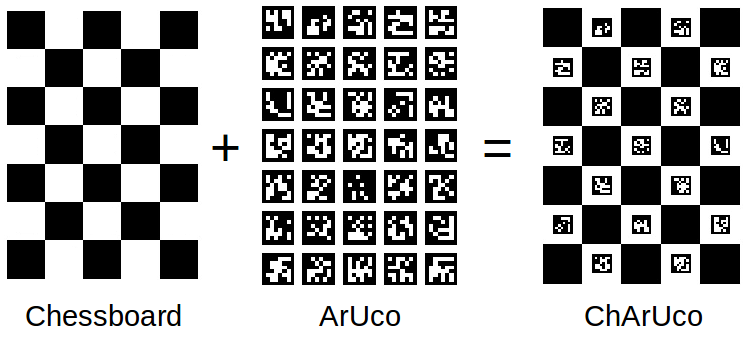
The ArUco part is used to interpolate the position of the chessboard corners, so that it has the versatility of marker boards, since it allows occlusions or partial views. Moreover, since the interpolated corners belong to a chessboard, they are very accurate in terms of subpixel accuracy.
When high precision is necessary, such as in camera calibration, Charuco boards are a better option than standard ArUco boards.
In this tutorial you will learn:
You can find this code in samples/cpp/tutorial_code/objectDetection/detect_board_charuco.cpp
Here's a sample code of how to achieve all the stuff enumerated at the goal list.
The aruco module provides the cv::aruco::CharucoBoard class that represents a Charuco Board and which inherits from the cv::aruco::Board class.
This class, as the rest of ChArUco functionalities, are defined in:
To define a cv::aruco::CharucoBoard, it is necessary:
As for the cv::aruco::GridBoard objects, the aruco module provides to create cv::aruco::CharucoBoard easily. This object can be easily created from these parameters using the cv::aruco::CharucoBoard constructor:
The ids of each of the markers are assigned by default in ascending order and starting on 0, like in cv::aruco::GridBoard constructor. This can be easily customized by accessing to the ids vector through board.ids, like in the cv::aruco::Board parent class.
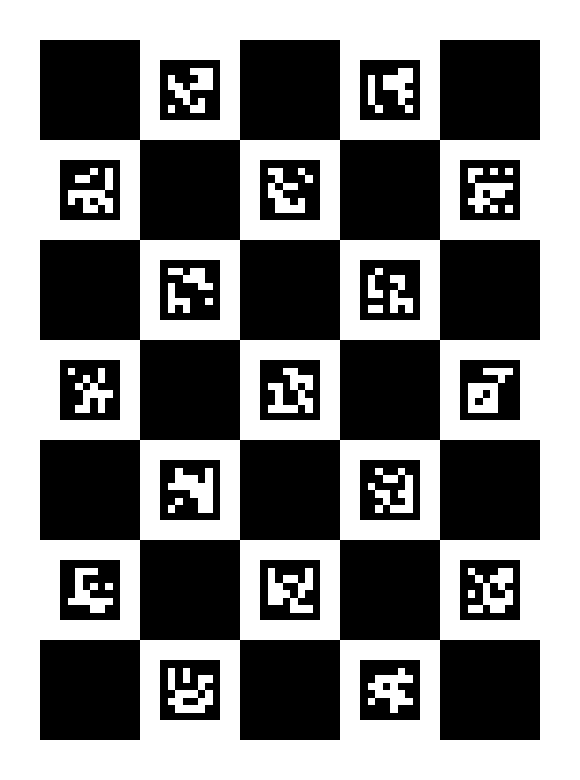
Once we have our cv::aruco::CharucoBoard object, we can create an image to print it. There are two ways to do this:
apps/pattern-tools/generate_pattern.py, see Create Calibration Pattern.cv::aruco::CharucoBoard::generateImage().The function cv::aruco::CharucoBoard::generateImage() is provided in cv::aruco::CharucoBoard class and can be called by using the following code:
cv::aruco::generateImageMarker() function. The default value is 1.The output image will be something like this:
A full working example is included in the create_board_charuco.cpp inside the samples/cpp/tutorial_code/objectDetection/.
The samples create_board_charuco.cpp now take input via commandline via the cv::CommandLineParser. For this file the example parameters will look like:
When you detect a ChArUco board, what you are actually detecting is each of the chessboard corners of the board.
Each corner on a ChArUco board has a unique identifier (id) assigned. These ids go from 0 to the total number of corners in the board. The steps of charuco board detection can be broken down to the following steps:
The original image where the markers are to be detected. The image is necessary to perform subpixel refinement in the ChArUco corners.
The parameters of readCameraParameters are:
This function takes these parameters as input and returns a boolean value of whether the camera calibration parameters are valid or not. For detection of charuco corners without calibration, this step is not required.
The detection of the ChArUco corners is based on the previous detected markers. So that, first markers are detected, and then ChArUco corners are interpolated from markers. The method that detect the ChArUco corners is cv::aruco::CharucoDetector::detectBoard().
The parameters of detectBoard are:
image - Input image.charucoCorners - output list of image positions of the detected corners.charucoIds - output ids for each of the detected corners in charucoCorners.markerCorners - input/output vector of detected marker corners.markerIds - input/output vector of identifiers of the detected markersIf markerCorners and markerIds are empty, the function will detect aruco markers and ids.
If calibration parameters are provided, the ChArUco corners are interpolated by, first, estimating a rough pose from the ArUco markers and, then, reprojecting the ChArUco corners back to the image.
On the other hand, if calibration parameters are not provided, the ChArUco corners are interpolated by calculating the corresponding homography between the ChArUco plane and the ChArUco image projection.
The main problem of using homography is that the interpolation is more sensible to image distortion. Actually, the homography is only performed using the closest markers of each ChArUco corner to reduce the effect of distortion.
When detecting markers for ChArUco boards, and specially when using homography, it is recommended to disable the corner refinement of markers. The reason of this is that, due to the proximity of the chessboard squares, the subpixel process can produce important deviations in the corner positions and these deviations are propagated to the ChArUco corner interpolation, producing poor results.
Furthermore, only those corners whose two surrounding markers have be found are returned. If any of the two surrounding markers has not been detected, this usually means that there is some occlusion or the image quality is not good in that zone. In any case, it is preferable not to consider that corner, since what we want is to be sure that the interpolated ChArUco corners are very accurate.
After the ChArUco corners have been interpolated, a subpixel refinement is performed.
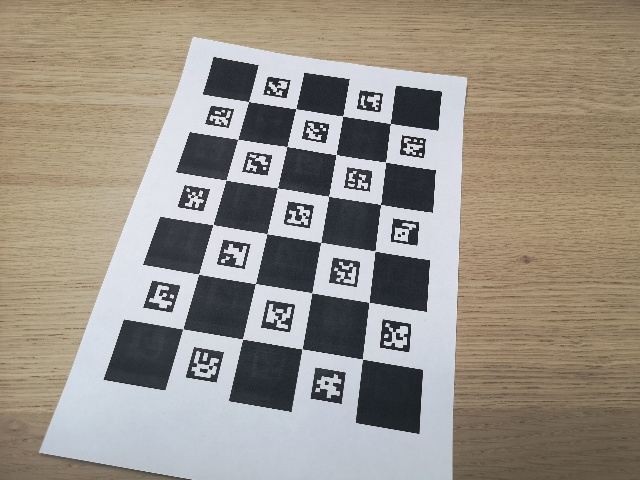
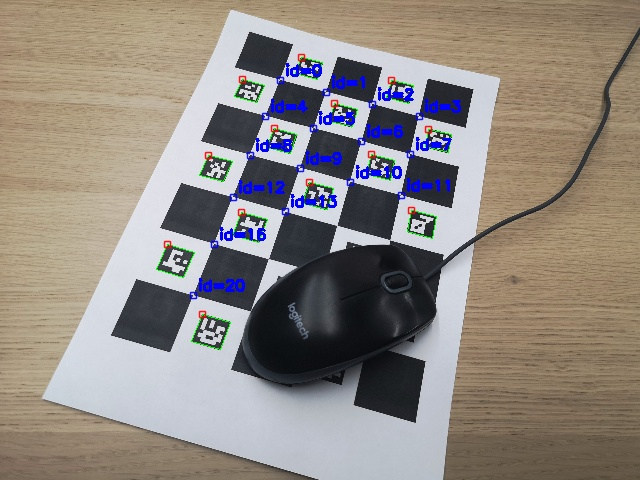
Once we have interpolated the ChArUco corners, we would probably want to draw them to see if their detections are correct. This can be easily done using the cv::aruco::drawDetectedCornersCharuco() function:
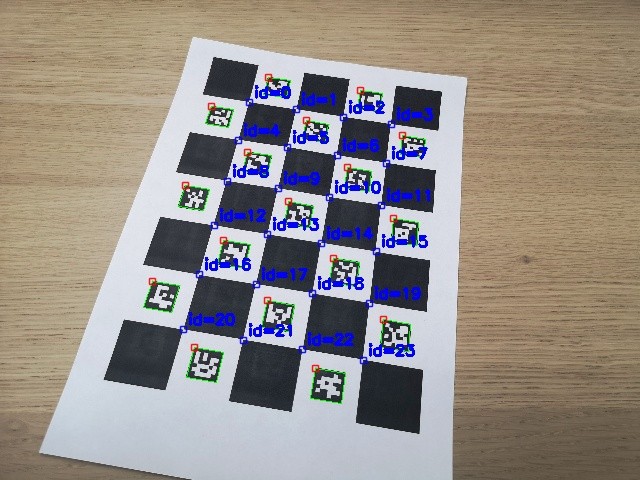
imageCopy is the image where the corners will be drawn (it will normally be the same image where the corners were detected).outputImage will be a clone of inputImage with the corners drawn.charucoCorners and charucoIds are the detected Charuco corners from the cv::aruco::CharucoDetector::detectBoard() function.cv::Scalar.For this image:
The result will be:
In the presence of occlusion. like in the following image, although some corners are clearly visible, not all their surrounding markers have been detected due occlusion and, thus, they are not interpolated:
Sample video:
A full working example is included in the detect_board_charuco.cpp inside the samples/cpp/tutorial_code/objectDetection/.
The samples detect_board_charuco.cpp now take input via commandline via the cv::CommandLineParser. For this file the example parameters will look like:
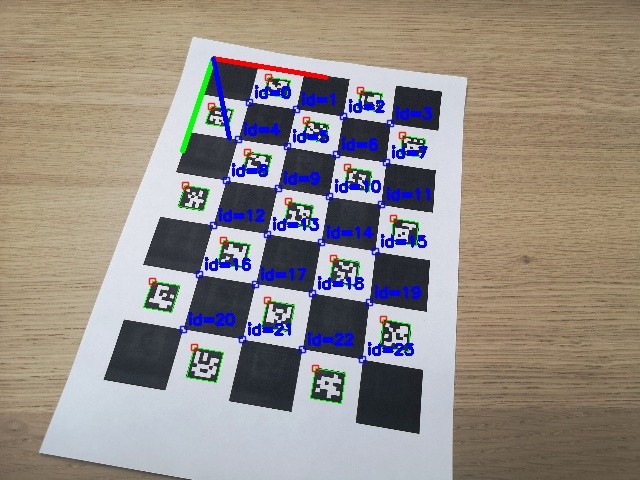
The final goal of the ChArUco boards is finding corners very accurately for a high precision calibration or pose estimation.
The aruco module provides a function to perform ChArUco pose estimation easily. As in the cv::aruco::GridBoard, the coordinate system of the cv::aruco::CharucoBoard is placed in the board plane with the Z axis pointing in, and centered in the bottom left corner of the board.
objPoints in CW order correspond to the Z-axis pointing in the plane. objPoints in CCW order correspond to the Z-axis pointing out the plane. See PR https://github.com/opencv/opencv_contrib/pull/3174To perform pose estimation for charuco boards, you should use cv::aruco::CharucoBoard::matchImagePoints() and cv::solvePnP():
charucoCorners and charucoIds parameters are the detected charuco corners from the cv::aruco::CharucoDetector::detectBoard() function.cameraMatrix and distCoeffs are the camera calibration parameters which are necessary for pose estimation.rvec and tvec parameters are the output pose of the Charuco Board.cv::solvePnP() returns true if the pose was correctly estimated and false otherwise. The main reason of failing is that there are not enough corners for pose estimation or they are in the same line.The axis can be drawn using cv::drawFrameAxes() to check the pose is correctly estimated. The result would be: (X:red, Y:green, Z:blue)
A full working example is included in the detect_board_charuco.cpp inside the samples/cpp/tutorial_code/objectDetection/.
The samples detect_board_charuco.cpp now take input via commandline via the cv::CommandLineParser. For this file the example parameters will look like: