DNN-based face detector.
More...
#include <opencv2/objdetect/face.hpp>
|
| virtual | ~FaceDetectorYN () |
| |
| virtual int | detect (InputArray image, OutputArray faces)=0 |
| | Detects faces in the input image. Following is an example output.
|
| |
| virtual Size | getInputSize ()=0 |
| |
| virtual float | getNMSThreshold ()=0 |
| |
| virtual float | getScoreThreshold ()=0 |
| |
| virtual int | getTopK ()=0 |
| |
| virtual void | setInputSize (const Size &input_size)=0 |
| | Set the size for the network input, which overwrites the input size of creating model. Call this method when the size of input image does not match the input size when creating model.
|
| |
| virtual void | setNMSThreshold (float nms_threshold)=0 |
| | Set the Non-maximum-suppression threshold to suppress bounding boxes that have IoU greater than the given value.
|
| |
| virtual void | setScoreThreshold (float score_threshold)=0 |
| | Set the score threshold to filter out bounding boxes of score less than the given value.
|
| |
| virtual void | setTopK (int top_k)=0 |
| | Set the number of bounding boxes preserved before NMS.
|
| |
|
| static Ptr< FaceDetectorYN > | create (const String &framework, const std::vector< uchar > &bufferModel, const std::vector< uchar > &bufferConfig, const Size &input_size, float score_threshold=0.9f, float nms_threshold=0.3f, int top_k=5000, int backend_id=0, int target_id=0) |
| |
| static Ptr< FaceDetectorYN > | create (CV_WRAP_FILE_PATH const String &model, CV_WRAP_FILE_PATH const String &config, const Size &input_size, float score_threshold=0.9f, float nms_threshold=0.3f, int top_k=5000, int backend_id=0, int target_id=0) |
| | Creates an instance of face detector class with given parameters.
|
| |
◆ ~FaceDetectorYN()
| virtual cv::FaceDetectorYN::~FaceDetectorYN |
( |
| ) |
|
|
inlinevirtual |
◆ create() [1/2]
| static Ptr< FaceDetectorYN > cv::FaceDetectorYN::create |
( |
const String & | framework, |
|
|
const std::vector< uchar > & | bufferModel, |
|
|
const std::vector< uchar > & | bufferConfig, |
|
|
const Size & | input_size, |
|
|
float | score_threshold = 0.9f, |
|
|
float | nms_threshold = 0.3f, |
|
|
int | top_k = 5000, |
|
|
int | backend_id = 0, |
|
|
int | target_id = 0 ) |
|
static |
| Python: |
|---|
| cv.FaceDetectorYN.create( | model, config, input_size[, score_threshold[, nms_threshold[, top_k[, backend_id[, target_id]]]]] | ) -> | retval |
| cv.FaceDetectorYN.create( | framework, bufferModel, bufferConfig, input_size[, score_threshold[, nms_threshold[, top_k[, backend_id[, target_id]]]]] | ) -> | retval |
| cv.FaceDetectorYN_create( | model, config, input_size[, score_threshold[, nms_threshold[, top_k[, backend_id[, target_id]]]]] | ) -> | retval |
| cv.FaceDetectorYN_create( | framework, bufferModel, bufferConfig, input_size[, score_threshold[, nms_threshold[, top_k[, backend_id[, target_id]]]]] | ) -> | retval |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
- Parameters
-
| framework | Name of origin framework |
| bufferModel | A buffer with a content of binary file with weights |
| bufferConfig | A buffer with a content of text file contains network configuration |
| input_size | the size of the input image |
| score_threshold | the threshold to filter out bounding boxes of score smaller than the given value |
| nms_threshold | the threshold to suppress bounding boxes of IoU bigger than the given value |
| top_k | keep top K bboxes before NMS |
| backend_id | the id of backend |
| target_id | the id of target device |
◆ create() [2/2]
| Python: |
|---|
| cv.FaceDetectorYN.create( | model, config, input_size[, score_threshold[, nms_threshold[, top_k[, backend_id[, target_id]]]]] | ) -> | retval |
| cv.FaceDetectorYN.create( | framework, bufferModel, bufferConfig, input_size[, score_threshold[, nms_threshold[, top_k[, backend_id[, target_id]]]]] | ) -> | retval |
| cv.FaceDetectorYN_create( | model, config, input_size[, score_threshold[, nms_threshold[, top_k[, backend_id[, target_id]]]]] | ) -> | retval |
| cv.FaceDetectorYN_create( | framework, bufferModel, bufferConfig, input_size[, score_threshold[, nms_threshold[, top_k[, backend_id[, target_id]]]]] | ) -> | retval |
Creates an instance of face detector class with given parameters.
- Parameters
-
| model | the path to the requested model |
| config | the path to the config file for compatibility, which is not requested for ONNX models |
| input_size | the size of the input image |
| score_threshold | the threshold to filter out bounding boxes of score smaller than the given value |
| nms_threshold | the threshold to suppress bounding boxes of IoU bigger than the given value |
| top_k | keep top K bboxes before NMS |
| backend_id | the id of backend |
| target_id | the id of target device |
◆ detect()
| Python: |
|---|
| cv.FaceDetectorYN.detect( | image[, faces] | ) -> | retval, faces |
Detects faces in the input image. Following is an example output.
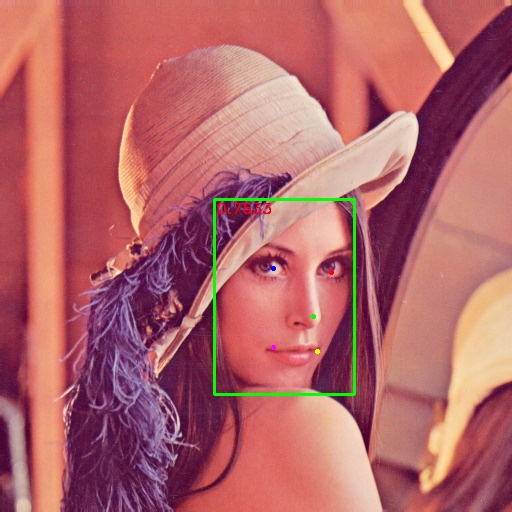
image
- Parameters
-
| image | an image to detect |
| faces | detection results stored in a 2D cv::Mat of shape [num_faces, 15]
- 0-1: x, y of bbox top left corner
- 2-3: width, height of bbox
- 4-5: x, y of right eye (blue point in the example image)
- 6-7: x, y of left eye (red point in the example image)
- 8-9: x, y of nose tip (green point in the example image)
- 10-11: x, y of right corner of mouth (pink point in the example image)
- 12-13: x, y of left corner of mouth (yellow point in the example image)
- 14: face score
|
◆ getInputSize()
| virtual Size cv::FaceDetectorYN::getInputSize |
( |
| ) |
|
|
pure virtual |
| Python: |
|---|
| cv.FaceDetectorYN.getInputSize( | | ) -> | retval |
◆ getNMSThreshold()
| virtual float cv::FaceDetectorYN::getNMSThreshold |
( |
| ) |
|
|
pure virtual |
| Python: |
|---|
| cv.FaceDetectorYN.getNMSThreshold( | | ) -> | retval |
◆ getScoreThreshold()
| virtual float cv::FaceDetectorYN::getScoreThreshold |
( |
| ) |
|
|
pure virtual |
| Python: |
|---|
| cv.FaceDetectorYN.getScoreThreshold( | | ) -> | retval |
◆ getTopK()
| virtual int cv::FaceDetectorYN::getTopK |
( |
| ) |
|
|
pure virtual |
| Python: |
|---|
| cv.FaceDetectorYN.getTopK( | | ) -> | retval |
◆ setInputSize()
| virtual void cv::FaceDetectorYN::setInputSize |
( |
const Size & | input_size | ) |
|
|
pure virtual |
| Python: |
|---|
| cv.FaceDetectorYN.setInputSize( | input_size | ) -> | None |
Set the size for the network input, which overwrites the input size of creating model. Call this method when the size of input image does not match the input size when creating model.
- Parameters
-
| input_size | the size of the input image |
◆ setNMSThreshold()
| virtual void cv::FaceDetectorYN::setNMSThreshold |
( |
float | nms_threshold | ) |
|
|
pure virtual |
| Python: |
|---|
| cv.FaceDetectorYN.setNMSThreshold( | nms_threshold | ) -> | None |
Set the Non-maximum-suppression threshold to suppress bounding boxes that have IoU greater than the given value.
- Parameters
-
| nms_threshold | threshold for NMS operation |
◆ setScoreThreshold()
| virtual void cv::FaceDetectorYN::setScoreThreshold |
( |
float | score_threshold | ) |
|
|
pure virtual |
| Python: |
|---|
| cv.FaceDetectorYN.setScoreThreshold( | score_threshold | ) -> | None |
Set the score threshold to filter out bounding boxes of score less than the given value.
- Parameters
-
| score_threshold | threshold for filtering out bounding boxes |
◆ setTopK()
| virtual void cv::FaceDetectorYN::setTopK |
( |
int | top_k | ) |
|
|
pure virtual |
| Python: |
|---|
| cv.FaceDetectorYN.setTopK( | top_k | ) -> | None |
Set the number of bounding boxes preserved before NMS.
- Parameters
-
| top_k | the number of bounding boxes to preserve from top rank based on score |
The documentation for this class was generated from the following file: