|
OpenCV 4.14.0-pre
Open Source Computer Vision
|
Loading...
Searching...
No Matches
|
OpenCV 4.14.0-pre
Open Source Computer Vision
|
Prev Tutorial: Detection of ArUco Markers
Next Tutorial: Detection of ChArUco Boards
| Original authors | Sergio Garrido, Alexander Panov |
| Compatibility | OpenCV >= 4.7.0 |
An ArUco board is a set of markers that acts like a single marker in the sense that it provides a single pose for the camera.
The most popular board is the one with all the markers in the same plane, since it can be easily printed:
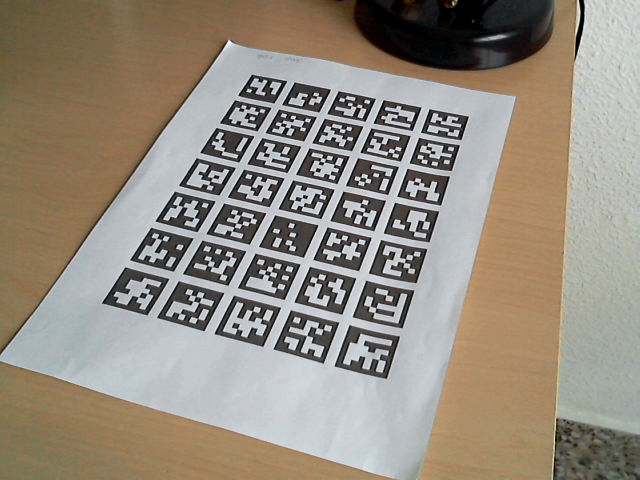
However, boards are not limited to this arrangement and can represent any 2d or 3d layout.
The difference between a board and a set of independent markers is that the relative position between the markers in the board is known a priori. This allows that the corners of all the markers can be used for estimating the pose of the camera respect to the whole board.
When you use a set of independent markers, you can estimate the pose for each marker individually, since you dont know the relative position of the markers in the environment.
The main benefits of using boards are:
A board detection is similar to the standard marker detection. The only difference is in the pose estimation step. In fact, to use marker boards, a standard marker detection should be done before estimating the board pose.
To perform pose estimation for boards, you should use solvePnP() function, as shown below in the samples/cpp/tutorial_code/objectDetection/detect_board.cpp.
The parameters are:
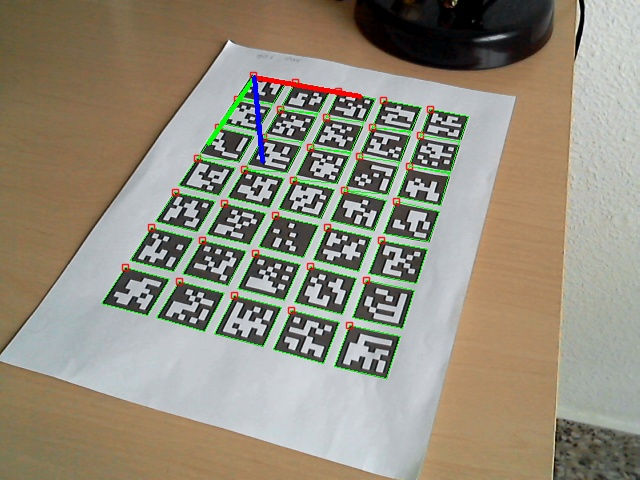
objPoints, imgPoints object and image points, matched with cv::aruco::GridBoard::matchImagePoints() which, in turn, takes as input markerCorners and markerIds structures of detected markers from cv::aruco::ArucoDetector::detectMarkers() function.board the cv::aruco::Board object that defines the board layout and its idscameraMatrix and distCoeffs: camera calibration parameters necessary for pose estimation.rvec and tvec: estimated pose of the board. If not empty then treated as initial guess.The drawFrameAxes() function can be used to check the obtained pose. For instance:
And this is another example with the board partially occluded:
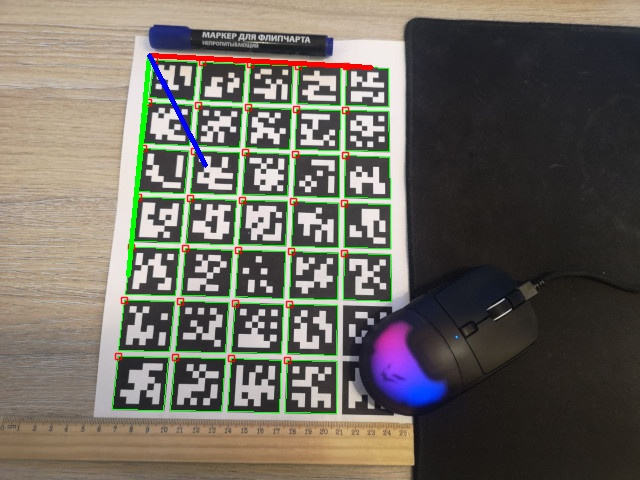
As it can be observed, although some markers have not been detected, the board pose can still be estimated from the rest of markers.
Sample video:
A full working example is included in the detect_board.cpp inside the samples/cpp/tutorial_code/objectDetection/.
The samples now take input via command line via the cv::CommandLineParser. For this file the example parameters will look like:
Parameters for detect_board.cpp:
Creating the cv::aruco::Board object requires specifying the corner positions for each marker in the environment. However, in many cases, the board will be just a set of markers in the same plane and in a grid layout, so it can be easily printed and used.
Fortunately, the aruco module provides the basic functionality to create and print these types of markers easily.
The cv::aruco::GridBoard class is a specialized class that inherits from the cv::aruco::Board class and which represents a Board with all the markers in the same plane and in a grid layout, as in the following image:
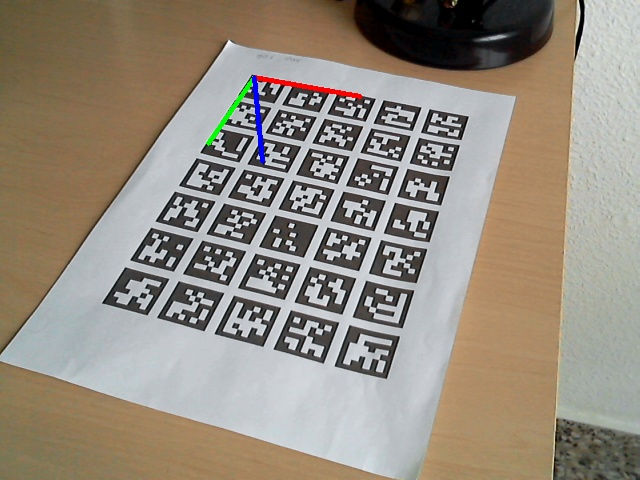
Concretely, the coordinate system in a grid board is positioned in the board plane, centered in the bottom left corner of the board and with the Z pointing out, like in the following image (X:red, Y:green, Z:blue):
A cv::aruco::GridBoard object can be defined using the following parameters:
This object can be easily created from these parameters using the cv::aruco::GridBoard constructor:
So, this board will be composed by 5x7=35 markers. The ids of each of the markers are assigned, by default, in ascending order starting on 0, so they will be 0, 1, 2, ..., 34.
After creating a grid board, we probably want to print it and use it. There are two ways to do this:
apps/pattern-tools/generate_pattern.py, see Create Calibration Pattern.cv::aruco::GridBoard::generateImage().The function cv::aruco::GridBoard::generateImage() is provided in cv::aruco::GridBoard class and can be called by using the following code:
boardImage: the output image with the board.generateImageMarker() function. The default value is 1.A full working example of board creation is included in the samples/cpp/tutorial_code/objectDetection/create_board.cpp
The output image will be something like this:
The samples now take input via commandline via the cv::CommandLineParser. For this file the example parameters will look like:
ArUco boards can also be used to improve the detection of markers. If we have detected a subset of the markers that belongs to the board, we can use these markers and the board layout information to try to find the markers that have not been previously detected.
This can be done using the cv::aruco::refineDetectedMarkers() function, which should be called after calling cv::aruco::ArucoDetector::detectMarkers().
The main parameters of this function are the original image where markers were detected, the board object, the detected marker corners, the detected marker ids and the rejected marker corners.
The rejected corners can be obtained from the cv::aruco::ArucoDetector::detectMarkers() function and are also known as marker candidates. This candidates are square shapes that have been found in the original image but have failed to pass the identification step (i.e. their inner codification presents too many errors) and thus they have not been recognized as markers.
However, these candidates are sometimes actual markers that have not been correctly identified due to high noise in the image, very low resolution or other related problems that affect to the binary code extraction. The cv::aruco::ArucoDetector::refineDetectedMarkers() function finds correspondences between these candidates and the missing markers of the board. This search is based on two parameters:
minRepDistance parameter in refineDetectedMarkers() determines the minimum euclidean distance between the candidate corners and the projected marker corners (default value 10).errorCorrectionRate parameter (default value 3.0). If a negative value is provided, the internal bits are not analyzed at all and only the corner distances are evaluated.This is an example of using the cv::aruco::ArucoDetector::refineDetectedMarkers() function:
It must also be noted that, in some cases, if the number of detected markers in the first place is too low (for instance only 1 or 2 markers), the projections of the missing markers can be of bad quality, producing erroneous correspondences.
See module samples for a more detailed implementation.