|
| void | detect (InputArray frame, std::vector< std::vector< Point > > &detections, std::vector< float > &confidences) const |
| | Performs detection. More...
|
| |
| void | detect (InputArray frame, std::vector< std::vector< Point > > &detections) const |
| |
| void | detectTextRectangles (InputArray frame, std::vector< cv::RotatedRect > &detections, std::vector< float > &confidences) const |
| | Performs detection. More...
|
| |
| void | detectTextRectangles (InputArray frame, std::vector< cv::RotatedRect > &detections) const |
| |
| | Model () |
| |
| | Model (const Model &)=default |
| |
| | Model (Model &&)=default |
| |
| | Model (const String &model, const String &config="") |
| | Create model from deep learning network represented in one of the supported formats. An order of model and config arguments does not matter. More...
|
| |
| | Model (const Net &network) |
| | Create model from deep learning network. More...
|
| |
| Impl * | getImpl () const |
| |
| Impl & | getImplRef () const |
| |
| Net & | getNetwork_ () const |
| |
| Net & | getNetwork_ () |
| |
| | operator Net & () const |
| |
| Model & | operator= (const Model &)=default |
| |
| Model & | operator= (Model &&)=default |
| |
| void | predict (InputArray frame, OutputArrayOfArrays outs) const |
| | Given the input frame, create input blob, run net and return the output blobs. More...
|
| |
| Model & | setInputCrop (bool crop) |
| | Set flag crop for frame. More...
|
| |
| Model & | setInputMean (const Scalar &mean) |
| | Set mean value for frame. More...
|
| |
| void | setInputParams (double scale=1.0, const Size &size=Size(), const Scalar &mean=Scalar(), bool swapRB=false, bool crop=false) |
| | Set preprocessing parameters for frame. More...
|
| |
| Model & | setInputScale (double scale) |
| | Set scalefactor value for frame. More...
|
| |
| Model & | setInputSize (const Size &size) |
| | Set input size for frame. More...
|
| |
| Model & | setInputSize (int width, int height) |
| |
| Model & | setInputSwapRB (bool swapRB) |
| | Set flag swapRB for frame. More...
|
| |
| Model & | setPreferableBackend (dnn::Backend backendId) |
| |
| Model & | setPreferableTarget (dnn::Target targetId) |
| |
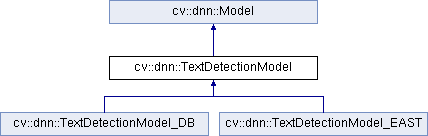
Base class for text detection networks.
| void cv::dnn::TextDetectionModel::detect |
( |
InputArray |
frame, |
|
|
std::vector< std::vector< Point > > & |
detections, |
|
|
std::vector< float > & |
confidences |
|
) |
| const |
| Python: |
|---|
| cv.dnn_TextDetectionModel.detect( | frame | ) -> | detections, confidences |
| cv.dnn_TextDetectionModel.detect( | frame | ) -> | detections |
Performs detection.
Given the input frame, prepare network input, run network inference, post-process network output and return result detections.
Each result is quadrangle's 4 points in this order:
- bottom-left
- top-left
- top-right
- bottom-right
Use cv::getPerspectiveTransform function to retrive image region without perspective transformations.
- Note
- If DL model doesn't support that kind of output then result may be derived from detectTextRectangles() output.
- Parameters
-
| [in] | frame | The input image |
| [out] | detections | array with detections' quadrangles (4 points per result) |
| [out] | confidences | array with detection confidences |
 Public Member Functions inherited from cv::dnn::Model
Public Member Functions inherited from cv::dnn::Model 1.8.13
1.8.13