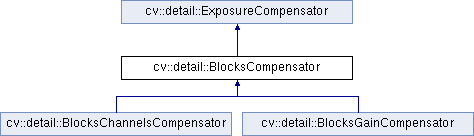
Exposure compensator which tries to remove exposure related artifacts by adjusting image blocks.
More...
#include <opencv2/stitching/detail/exposure_compensate.hpp>
|
| template<class Compensator > |
| void | feed (const std::vector< Point > &corners, const std::vector< UMat > &images, const std::vector< std::pair< UMat, uchar > > &masks) |
| |
Exposure compensator which tries to remove exposure related artifacts by adjusting image blocks.
- Examples:
- samples/cpp/stitching_detailed.cpp.
◆ BlocksCompensator()
| cv::detail::BlocksCompensator::BlocksCompensator |
( |
int |
bl_width = 32, |
|
|
int |
bl_height = 32, |
|
|
int |
nr_feeds = 1 |
|
) |
| |
|
inline |
◆ apply()
| Python: |
|---|
| cv.detail_BlocksCompensator.apply( | index, corner, image, mask | ) -> | image |
◆ feed()
template<class Compensator >
| void cv::detail::BlocksCompensator::feed |
( |
const std::vector< Point > & |
corners, |
|
|
const std::vector< UMat > & |
images, |
|
|
const std::vector< std::pair< UMat, uchar > > & |
masks |
|
) |
| |
|
protectedvirtual |
◆ getBlockSize()
| Size cv::detail::BlocksCompensator::getBlockSize |
( |
| ) |
const |
|
inline |
| Python: |
|---|
| cv.detail_BlocksCompensator.getBlockSize( | | ) -> | retval |
◆ getMatGains()
| void cv::detail::BlocksCompensator::getMatGains |
( |
std::vector< Mat > & |
umv | ) |
|
|
virtual |
| Python: |
|---|
| cv.detail_BlocksCompensator.getMatGains( | [, umv] | ) -> | umv |
◆ getNrFeeds()
| int cv::detail::BlocksCompensator::getNrFeeds |
( |
| ) |
|
|
inline |
| Python: |
|---|
| cv.detail_BlocksCompensator.getNrFeeds( | | ) -> | retval |
◆ getNrGainsFilteringIterations()
| int cv::detail::BlocksCompensator::getNrGainsFilteringIterations |
( |
| ) |
const |
|
inline |
| Python: |
|---|
| cv.detail_BlocksCompensator.getNrGainsFilteringIterations( | | ) -> | retval |
◆ getSimilarityThreshold()
| double cv::detail::BlocksCompensator::getSimilarityThreshold |
( |
| ) |
const |
|
inline |
| Python: |
|---|
| cv.detail_BlocksCompensator.getSimilarityThreshold( | | ) -> | retval |
◆ setBlockSize() [1/2]
| void cv::detail::BlocksCompensator::setBlockSize |
( |
int |
width, |
|
|
int |
height |
|
) |
| |
|
inline |
| Python: |
|---|
| cv.detail_BlocksCompensator.setBlockSize( | width, height | ) -> | None |
| cv.detail_BlocksCompensator.setBlockSize( | size | ) -> | None |
◆ setBlockSize() [2/2]
| void cv::detail::BlocksCompensator::setBlockSize |
( |
Size |
size | ) |
|
|
inline |
| Python: |
|---|
| cv.detail_BlocksCompensator.setBlockSize( | width, height | ) -> | None |
| cv.detail_BlocksCompensator.setBlockSize( | size | ) -> | None |
◆ setMatGains()
| void cv::detail::BlocksCompensator::setMatGains |
( |
std::vector< Mat > & |
umv | ) |
|
|
virtual |
| Python: |
|---|
| cv.detail_BlocksCompensator.setMatGains( | umv | ) -> | None |
◆ setNrFeeds()
| void cv::detail::BlocksCompensator::setNrFeeds |
( |
int |
nr_feeds | ) |
|
|
inline |
| Python: |
|---|
| cv.detail_BlocksCompensator.setNrFeeds( | nr_feeds | ) -> | None |
◆ setNrGainsFilteringIterations()
| void cv::detail::BlocksCompensator::setNrGainsFilteringIterations |
( |
int |
nr_iterations | ) |
|
|
inline |
| Python: |
|---|
| cv.detail_BlocksCompensator.setNrGainsFilteringIterations( | nr_iterations | ) -> | None |
◆ setSimilarityThreshold()
| void cv::detail::BlocksCompensator::setSimilarityThreshold |
( |
double |
similarity_threshold | ) |
|
|
inline |
| Python: |
|---|
| cv.detail_BlocksCompensator.setSimilarityThreshold( | similarity_threshold | ) -> | None |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from cv::detail::ExposureCompensator
Public Member Functions inherited from cv::detail::ExposureCompensator 1.8.13
1.8.13