import java.util.ArrayList;
import java.util.List;
import org.opencv.calib3d.Calib3d;
import org.opencv.core.Core;
import org.opencv.core.CvType;
import org.opencv.core.DMatch;
import org.opencv.core.KeyPoint;
import org.opencv.core.Mat;
import org.opencv.core.MatOfByte;
import org.opencv.core.MatOfDMatch;
import org.opencv.core.MatOfKeyPoint;
import org.opencv.core.MatOfPoint2f;
import org.opencv.core.Point;
import org.opencv.core.Scalar;
import org.opencv.features2d.DescriptorMatcher;
import org.opencv.features2d.Features2d;
import org.opencv.highgui.HighGui;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
import org.opencv.xfeatures2d.SURF;
class SURFFLANNMatchingHomography {
public void run(
String[] args) {
String filenameObject = args.length > 1 ? args[0] :
"../data/box.png";
String filenameScene = args.length > 1 ? args[1] :
"../data/box_in_scene.png";
Mat imgObject = Imgcodecs.imread(filenameObject, Imgcodecs.IMREAD_GRAYSCALE);
Mat imgScene = Imgcodecs.imread(filenameScene, Imgcodecs.IMREAD_GRAYSCALE);
if (imgObject.empty() || imgScene.empty()) {
System.err.println("Cannot read images!");
System.exit(0);
}
double hessianThreshold = 400;
int nOctaves = 4, nOctaveLayers = 3;
boolean extended = false, upright = false;
SURF detector = SURF.create(hessianThreshold, nOctaves, nOctaveLayers, extended, upright);
MatOfKeyPoint keypointsObject = new MatOfKeyPoint(), keypointsScene = new MatOfKeyPoint();
Mat descriptorsObject = new Mat(), descriptorsScene = new Mat();
detector.detectAndCompute(imgObject, new Mat(), keypointsObject, descriptorsObject);
detector.detectAndCompute(imgScene, new Mat(), keypointsScene, descriptorsScene);
DescriptorMatcher matcher = DescriptorMatcher.create(DescriptorMatcher.FLANNBASED);
List<MatOfDMatch> knnMatches = new ArrayList<>();
matcher.knnMatch(descriptorsObject, descriptorsScene, knnMatches, 2);
float ratioThresh = 0.75f;
List<DMatch> listOfGoodMatches = new ArrayList<>();
for (int i = 0; i < knnMatches.size(); i++) {
if (knnMatches.get(i).rows() > 1) {
DMatch[] matches = knnMatches.get(i).toArray();
if (matches[0].distance < ratioThresh * matches[1].distance) {
listOfGoodMatches.add(matches[0]);
}
}
}
MatOfDMatch goodMatches = new MatOfDMatch();
goodMatches.fromList(listOfGoodMatches);
Mat imgMatches = new Mat();
Features2d.drawMatches(imgObject, keypointsObject, imgScene, keypointsScene, goodMatches, imgMatches,
Scalar.
all(-1),
Scalar.
all(-1),
new MatOfByte(), Features2d.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS);
List<Point> obj = new ArrayList<>();
List<Point> scene = new ArrayList<>();
List<KeyPoint> listOfKeypointsObject = keypointsObject.toList();
List<KeyPoint> listOfKeypointsScene = keypointsScene.toList();
for (int i = 0; i < listOfGoodMatches.size(); i++) {
obj.add(listOfKeypointsObject.get(listOfGoodMatches.get(i).queryIdx).pt);
scene.add(listOfKeypointsScene.get(listOfGoodMatches.get(i).trainIdx).pt);
}
MatOfPoint2f objMat = new MatOfPoint2f(), sceneMat = new MatOfPoint2f();
objMat.fromList(obj);
sceneMat.fromList(scene);
double ransacReprojThreshold = 3.0;
Mat H = Calib3d.findHomography( objMat, sceneMat, Calib3d.RANSAC, ransacReprojThreshold );
Mat objCorners = new Mat(4, 1, CvType.CV_32FC2), sceneCorners = new Mat();
float[] objCornersData = new float[(int) (objCorners.total() * objCorners.channels())];
objCorners.get(0, 0, objCornersData);
objCornersData[0] = 0;
objCornersData[1] = 0;
objCornersData[2] = imgObject.cols();
objCornersData[3] = 0;
objCornersData[4] = imgObject.cols();
objCornersData[5] = imgObject.rows();
objCornersData[6] = 0;
objCornersData[7] = imgObject.rows();
objCorners.put(0, 0, objCornersData);
Core.perspectiveTransform(objCorners, sceneCorners, H);
float[] sceneCornersData = new float[(int) (sceneCorners.total() * sceneCorners.channels())];
sceneCorners.get(0, 0, sceneCornersData);
Imgproc.line(imgMatches,
new Point(sceneCornersData[0] + imgObject.cols(), sceneCornersData[1]),
new Point(sceneCornersData[2] + imgObject.cols(), sceneCornersData[3]),
new Scalar(0, 255, 0), 4);
Imgproc.line(imgMatches,
new Point(sceneCornersData[2] + imgObject.cols(), sceneCornersData[3]),
new Point(sceneCornersData[4] + imgObject.cols(), sceneCornersData[5]),
new Scalar(0, 255, 0), 4);
Imgproc.line(imgMatches,
new Point(sceneCornersData[4] + imgObject.cols(), sceneCornersData[5]),
new Point(sceneCornersData[6] + imgObject.cols(), sceneCornersData[7]),
new Scalar(0, 255, 0), 4);
Imgproc.line(imgMatches,
new Point(sceneCornersData[6] + imgObject.cols(), sceneCornersData[7]),
new Point(sceneCornersData[0] + imgObject.cols(), sceneCornersData[1]),
new Scalar(0, 255, 0), 4);
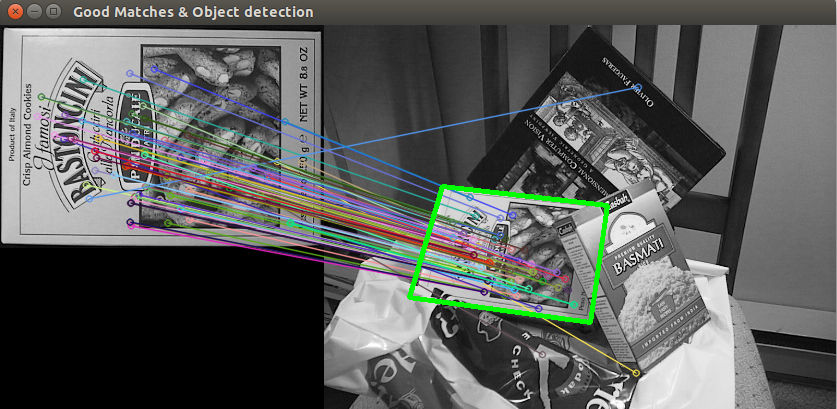
HighGui.imshow("Good Matches & Object detection", imgMatches);
HighGui.waitKey(0);
System.exit(0);
}
}
public class SURFFLANNMatchingHomographyDemo {
public static void main(
String[] args) {
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
new SURFFLANNMatchingHomography().run(args);
}
}
 1.8.13
1.8.13