|
OpenCV
3.4.1
Open Source Computer Vision
|
|
OpenCV
3.4.1
Open Source Computer Vision
|
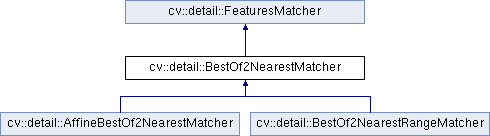
Features matcher which finds two best matches for each feature and leaves the best one only if the ratio between descriptor distances is greater than the threshold match_conf. More...
#include "matchers.hpp"
Public Member Functions | |
| BestOf2NearestMatcher (bool try_use_gpu=false, float match_conf=0.3f, int num_matches_thresh1=6, int num_matches_thresh2=6) | |
| Constructs a "best of 2 nearest" matcher. More... | |
| void | collectGarbage () |
| Frees unused memory allocated before if there is any. More... | |
 Public Member Functions inherited from cv::detail::FeaturesMatcher Public Member Functions inherited from cv::detail::FeaturesMatcher | |
| virtual | ~FeaturesMatcher () |
| bool | isThreadSafe () const |
| void | operator() (const ImageFeatures &features1, const ImageFeatures &features2, MatchesInfo &matches_info) |
| void | operator() (const std::vector< ImageFeatures > &features, std::vector< MatchesInfo > &pairwise_matches, const cv::UMat &mask=cv::UMat()) |
| Performs images matching. More... | |
Protected Member Functions | |
| void | match (const ImageFeatures &features1, const ImageFeatures &features2, MatchesInfo &matches_info) |
| This method must implement matching logic in order to make the wrappers detail::FeaturesMatcher::operator()_ work. More... | |
| Protected Member Functions inherited from cv::detail::FeaturesMatcher | |
| FeaturesMatcher (bool is_thread_safe=false) | |
Protected Attributes | |
| Ptr< FeaturesMatcher > | impl_ |
| int | num_matches_thresh1_ |
| int | num_matches_thresh2_ |
| Protected Attributes inherited from cv::detail::FeaturesMatcher | |
| bool | is_thread_safe_ |
Features matcher which finds two best matches for each feature and leaves the best one only if the ratio between descriptor distances is greater than the threshold match_conf.
| cv::detail::BestOf2NearestMatcher::BestOf2NearestMatcher | ( | bool | try_use_gpu = false, |
| float | match_conf = 0.3f, |
||
| int | num_matches_thresh1 = 6, |
||
| int | num_matches_thresh2 = 6 |
||
| ) |
Constructs a "best of 2 nearest" matcher.
| try_use_gpu | Should try to use GPU or not |
| match_conf | Match distances ration threshold |
| num_matches_thresh1 | Minimum number of matches required for the 2D projective transform estimation used in the inliers classification step |
| num_matches_thresh2 | Minimum number of matches required for the 2D projective transform re-estimation on inliers |
|
virtual |
Frees unused memory allocated before if there is any.
Reimplemented from cv::detail::FeaturesMatcher.
|
protectedvirtual |
This method must implement matching logic in order to make the wrappers detail::FeaturesMatcher::operator()_ work.
| features1 | first image features |
| features2 | second image features |
| matches_info | found matches |
Implements cv::detail::FeaturesMatcher.
Reimplemented in cv::detail::AffineBestOf2NearestMatcher.
|
protected |
|
protected |
|
protected |
 1.8.12
1.8.12