|
OpenCV
3.3.0
Open Source Computer Vision
|
|
OpenCV
3.3.0
Open Source Computer Vision
|
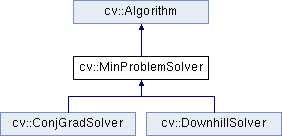
Basic interface for all solvers. More...
#include "optim.hpp"
Classes | |
| class | Function |
| Represents function being optimized. More... | |
Public Member Functions | |
| virtual Ptr< Function > | getFunction () const =0 |
| Getter for the optimized function. More... | |
| virtual TermCriteria | getTermCriteria () const =0 |
| Getter for the previously set terminal criteria for this algorithm. More... | |
| virtual double | minimize (InputOutputArray x)=0 |
| actually runs the algorithm and performs the minimization. More... | |
| virtual void | setFunction (const Ptr< Function > &f)=0 |
| Setter for the optimized function. More... | |
| virtual void | setTermCriteria (const TermCriteria &termcrit)=0 |
| Set terminal criteria for solver. More... | |
 Public Member Functions inherited from cv::Algorithm Public Member Functions inherited from cv::Algorithm | |
| Algorithm () | |
| virtual | ~Algorithm () |
| virtual void | clear () |
| Clears the algorithm state. More... | |
| virtual bool | empty () const |
| Returns true if the Algorithm is empty (e.g. in the very beginning or after unsuccessful read. More... | |
| virtual String | getDefaultName () const |
| virtual void | read (const FileNode &fn) |
| Reads algorithm parameters from a file storage. More... | |
| virtual void | save (const String &filename) const |
| virtual void | write (FileStorage &fs) const |
| Stores algorithm parameters in a file storage. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from cv::Algorithm | |
| template<typename _Tp > | |
| static Ptr< _Tp > | load (const String &filename, const String &objname=String()) |
| Loads algorithm from the file. More... | |
| template<typename _Tp > | |
| static Ptr< _Tp > | loadFromString (const String &strModel, const String &objname=String()) |
| Loads algorithm from a String. More... | |
| template<typename _Tp > | |
| static Ptr< _Tp > | read (const FileNode &fn) |
| Reads algorithm from the file node. More... | |
| Protected Member Functions inherited from cv::Algorithm | |
| void | writeFormat (FileStorage &fs) const |
Basic interface for all solvers.
Getter for the optimized function.
The optimized function is represented by Function interface, which requires derivatives to implement the calc(double*) and getDim() methods to evaluate the function.
|
pure virtual |
Getter for the previously set terminal criteria for this algorithm.
|
pure virtual |
actually runs the algorithm and performs the minimization.
The sole input parameter determines the centroid of the starting simplex (roughly, it tells where to start), all the others (terminal criteria, initial step, function to be minimized) are supposed to be set via the setters before the call to this method or the default values (not always sensible) will be used.
| x | The initial point, that will become a centroid of an initial simplex. After the algorithm will terminate, it will be setted to the point where the algorithm stops, the point of possible minimum. |
Setter for the optimized function.
It should be called at least once before the call to* minimize(), as default value is not usable.
| f | The new function to optimize. |
|
pure virtual |
Set terminal criteria for solver.
This method is not necessary to be called before the first call to minimize(), as the default value is sensible.
Algorithm stops when the number of function evaluations done exceeds termcrit.maxCount, when the function values at the vertices of simplex are within termcrit.epsilon range or simplex becomes so small that it can enclosed in a box with termcrit.epsilon sides, whatever comes first.
| termcrit | Terminal criteria to be used, represented as cv::TermCriteria structure. |
 1.8.12
1.8.12