The out-of-focus image on this page is a real world image. The out-of-focus was achieved manually by camera optics.
What is a degradation image model?
Here is a mathematical model of the image degradation in frequency domain representation:
S = H\cdot U + N
where S is a spectrum of blurred (degraded) image, U is a spectrum of original true (undegraded) image, H is a frequency response of point spread function (PSF), N is a spectrum of additive noise.
The circular PSF is a good approximation of out-of-focus distortion. Such a PSF is specified by only one parameter - radius R. Circular PSF is used in this work.
Circular point spread function
How to restore a blurred image?
The objective of restoration (deblurring) is to obtain an estimate of the original image. The restoration formula in frequency domain is:
U' = H_w\cdot S
where U' is the spectrum of estimation of original image U, and H_w is the restoration filter, for example, the Wiener filter.
What is the Wiener filter?
The Wiener filter is a way to restore a blurred image. Let's suppose that the PSF is a real and symmetric signal, a power spectrum of the original true image and noise are not known, then a simplified Wiener formula is:
H_w = \frac{H}{|H|^2+\frac{1}{SNR}}
where SNR is signal-to-noise ratio.
So, in order to recover an out-of-focus image by Wiener filter, it needs to know the SNR and R of the circular PSF.
Source code
You can find source code in the samples/cpp/tutorial_code/ImgProc/out_of_focus_deblur_filter/out_of_focus_deblur_filter.cpp of the OpenCV source code library.
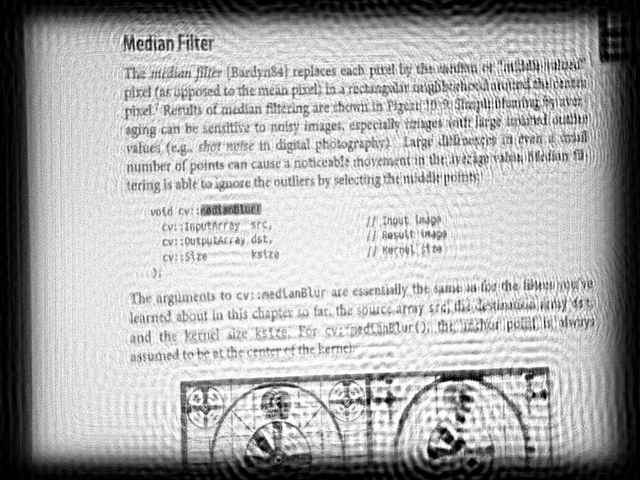
And the following result has been computed with R = 53 and SNR = 5200 parameters:
The restored (deblurred) image
The Wiener filter was used, and values of R and SNR were selected manually to give the best possible visual result. We can see that the result is not perfect, but it gives us a hint to the image's content. With some difficulty, the text is readable.
Note
The parameter R is the most important. So you should adjust R first, then SNR.
Sometimes you can observe the ringing effect in a restored image. This effect can be reduced with several methods. For example, you can taper input image edges.
You can also find a quick video demonstration of this on YouTube.



 1.8.13
1.8.13