Prev Tutorial: Hough Circle Transform
Next Tutorial: Remapping
| |
| Original author | Markus Heck |
| Compatibility | OpenCV >= 3.4 |
Goal
In this tutorial you will learn how to:
Example
What does this program do?
- Load the image and template


- Instantiate cv::GeneralizedHoughBallard with the help of
createGeneralizedHoughBallard()
- Instantiate cv::GeneralizedHoughGuil with the help of
createGeneralizedHoughGuil()
- Set the required parameters for both GeneralizedHough variants
- Detect and show found results
- Note
- Both variants can't be instantiated directly. Using the create methods is required.
- Guil Hough is very slow. Calculating the results for the "mini" files used in this tutorial takes only a few seconds. With image and template in a higher resolution, as shown below, my notebook requires about 5 minutes to calculate a result.


Code
The complete code for this tutorial is shown below.
samples::addSamplesDataSearchSubDirectory("doc/tutorials/imgproc/generalized_hough_ballard_guil");
Mat image = imread(samples::findFile(
"images/generalized_hough_mini_image.jpg"));
Mat templ = imread(samples::findFile(
"images/generalized_hough_mini_template.jpg"), IMREAD_GRAYSCALE);
cvtColor(image, grayImage, COLOR_RGB2GRAY);
vector<Vec4f> positionBallard, positionGuil;
ballard->setMinDist(10);
ballard->setLevels(360);
ballard->setDp(2);
ballard->setMaxBufferSize(1000);
ballard->setVotesThreshold(40);
ballard->setCannyLowThresh(30);
ballard->setCannyHighThresh(110);
ballard->setTemplate(templ);
guil->setMinDist(10);
guil->setLevels(360);
guil->setDp(3);
guil->setMaxBufferSize(1000);
guil->setMinAngle(0);
guil->setMaxAngle(360);
guil->setAngleStep(1);
guil->setAngleThresh(1500);
guil->setMinScale(0.5);
guil->setMaxScale(2.0);
guil->setScaleStep(0.05);
guil->setScaleThresh(50);
guil->setPosThresh(10);
guil->setCannyLowThresh(30);
guil->setCannyHighThresh(110);
guil->setTemplate(templ);
ballard->detect(grayImage, positionBallard);
guil->detect(grayImage, positionGuil);
for (vector<Vec4f>::iterator iter = positionBallard.begin(); iter != positionBallard.end(); ++iter) {
Size2f(w * (*iter)[2], h * (*iter)[2]),
(*iter)[3]);
for (int i = 0; i < 4; i++)
line(image, vertices[i], vertices[(i + 1) % 4],
Scalar(255, 0, 0), 6);
}
for (vector<Vec4f>::iterator iter = positionGuil.begin(); iter != positionGuil.end(); ++iter) {
Size2f(w * (*iter)[2], h * (*iter)[2]),
(*iter)[3]);
for (int i = 0; i < 4; i++)
line(image, vertices[i], vertices[(i + 1) % 4],
Scalar(0, 255, 0), 2);
}
imshow("result_img", image);
waitKey();
return EXIT_SUCCESS;
}
n-dimensional dense array class
Definition mat.hpp:840
int cols
Definition mat.hpp:2204
int rows
the number of rows and columns or (-1, -1) when the matrix has more than 2 dimensions
Definition mat.hpp:2204
The class represents rotated (i.e. not up-right) rectangles on a plane.
Definition types.hpp:538
void points(Point2f pts[]) const
std::shared_ptr< _Tp > Ptr
Definition cvstd_wrapper.hpp:23
int main(int argc, char *argv[])
Definition highgui_qt.cpp:3
Explanation
Load image, template and setup variables
samples::addSamplesDataSearchSubDirectory("doc/tutorials/imgproc/generalized_hough_ballard_guil");
Mat image =
imread(samples::findFile(
"images/generalized_hough_mini_image.jpg"));
Mat templ =
imread(samples::findFile(
"images/generalized_hough_mini_template.jpg"), IMREAD_GRAYSCALE);
cvtColor(image, grayImage, COLOR_RGB2GRAY);
vector<Vec4f> positionBallard, positionGuil;
The position vectors will contain the matches the detectors will find. Every entry contains four floating point values: position vector
- [0]: x coordinate of center point
- [1]: y coordinate of center point
- [2]: scale of detected object compared to template
- [3]: rotation of detected object in degree in relation to template
An example could look as follows: [200, 100, 0.9, 120]
Setup parameters
ballard->setMinDist(10);
ballard->setLevels(360);
ballard->setDp(2);
ballard->setMaxBufferSize(1000);
ballard->setVotesThreshold(40);
ballard->setCannyLowThresh(30);
ballard->setCannyHighThresh(110);
ballard->setTemplate(templ);
guil->setMinDist(10);
guil->setLevels(360);
guil->setDp(3);
guil->setMaxBufferSize(1000);
guil->setMinAngle(0);
guil->setMaxAngle(360);
guil->setAngleStep(1);
guil->setAngleThresh(1500);
guil->setMinScale(0.5);
guil->setMaxScale(2.0);
guil->setScaleStep(0.05);
guil->setScaleThresh(50);
guil->setPosThresh(10);
guil->setCannyLowThresh(30);
guil->setCannyHighThresh(110);
guil->setTemplate(templ);
Finding the optimal values can end up in trial and error and depends on many factors, such as the image resolution.
Run detection
ballard->detect(grayImage, positionBallard);
guil->detect(grayImage, positionGuil);
As mentioned above, this step will take some time, especially with larger images and when using Guil.
Draw results and show image
for (vector<Vec4f>::iterator iter = positionBallard.begin(); iter != positionBallard.end(); ++iter) {
Size2f(w * (*iter)[2], h * (*iter)[2]),
(*iter)[3]);
for (int i = 0; i < 4; i++)
line(image, vertices[i], vertices[(i + 1) % 4],
Scalar(255, 0, 0), 6);
}
for (vector<Vec4f>::iterator iter = positionGuil.begin(); iter != positionGuil.end(); ++iter) {
Size2f(w * (*iter)[2], h * (*iter)[2]),
(*iter)[3]);
for (int i = 0; i < 4; i++)
line(image, vertices[i], vertices[(i + 1) % 4],
Scalar(0, 255, 0), 2);
}
Result
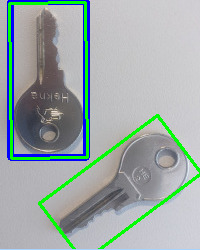
result image
The blue rectangle shows the result of cv::GeneralizedHoughBallard and the green rectangles the results of cv::GeneralizedHoughGuil.
Getting perfect results like in this example is unlikely if the parameters are not perfectly adapted to the sample. An example with less perfect parameters is shown below. For the Ballard variant, only the center of the result is marked as a black dot on this image. The rectangle would be the same as on the previous image.

less perfect result