|
OpenCV 4.14.0-pre
Open Source Computer Vision
|
Loading...
Searching...
No Matches
|
OpenCV 4.14.0-pre
Open Source Computer Vision
|
The pose computation problem [188] consists in solving for the rotation and translation that minimizes the reprojection error from 3D-2D point correspondences.
The solvePnP and related functions estimate the object pose given a set of object points, their corresponding image projections, as well as the camera intrinsic matrix and the distortion coefficients, see the figure below (more precisely, the convention in the computer vision field is to have the X-axis of the camera frame pointing to the right, the Y-axis downward and the Z-axis forward).
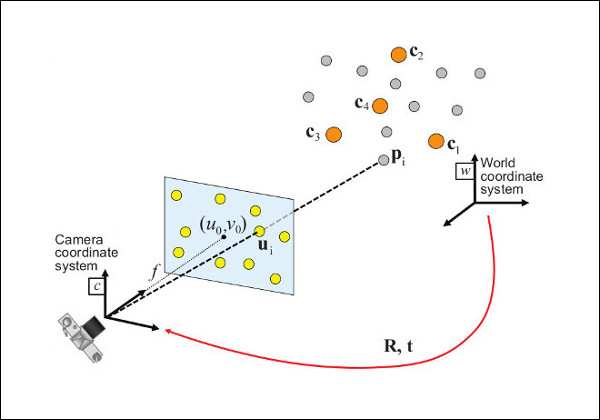
Points expressed in the world frame \( \bf{X}_w \) are projected into the image plane \( \left[ u, v \right] \) using the perspective projection model \( \Pi \) and the camera intrinsic parameters matrix \( \bf{A} \) (also denoted \( \bf{K} \) in the literature):
\[ \begin{align*} \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} &= \bf{A} \hspace{0.1em} \Pi \hspace{0.2em} ^{c}\bf{T}_w \begin{bmatrix} X_{w} \\ Y_{w} \\ Z_{w} \\ 1 \end{bmatrix} \\ \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} &= \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & r_{13} & t_x \\ r_{21} & r_{22} & r_{23} & t_y \\ r_{31} & r_{32} & r_{33} & t_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} X_{w} \\ Y_{w} \\ Z_{w} \\ 1 \end{bmatrix} \end{align*} \]
The estimated pose is thus the rotation (rvec) and the translation (tvec) vectors that allow transforming a 3D point expressed in the world frame into the camera frame:
\[ \begin{align*} \begin{bmatrix} X_c \\ Y_c \\ Z_c \\ 1 \end{bmatrix} &= \hspace{0.2em} ^{c}\bf{T}_w \begin{bmatrix} X_{w} \\ Y_{w} \\ Z_{w} \\ 1 \end{bmatrix} \\ \begin{bmatrix} X_c \\ Y_c \\ Z_c \\ 1 \end{bmatrix} &= \begin{bmatrix} r_{11} & r_{12} & r_{13} & t_x \\ r_{21} & r_{22} & r_{23} & t_y \\ r_{31} & r_{32} & r_{33} & t_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} X_{w} \\ Y_{w} \\ Z_{w} \\ 1 \end{bmatrix} \end{align*} \]
Refer to the cv::SolvePnPMethod enum documentation for the list of possible values. Some details about each method are described below:
The cv::solveP3P() computes an object pose from exactly 3 3D-2D point correspondences. A P3P problem has up to 4 solutions.
The cv::solvePnP() returns the rotation and the translation vectors that transform a 3D point expressed in the object coordinate frame to the camera coordinate frame, using different methods:
The cv::solvePnPGeneric() allows retrieving all the possible solutions.
Currently, only cv::SOLVEPNP_P3P, cv::SOLVEPNP_AP3P, cv::SOLVEPNP_IPPE, cv::SOLVEPNP_IPPE_SQUARE, cv::SOLVEPNP_SQPNP can return multiple solutions.
The cv::solvePnPRansac() computes the object pose wrt. the camera frame using a RANSAC scheme to deal with outliers.
More information can be found in [331]
Pose refinement consists in estimating the rotation and translation that minimizes the reprojection error using a non-linear minimization method and starting from an initial estimate of the solution. OpenCV proposes cv::solvePnPRefineLM() and cv::solvePnPRefineVVS() for this problem.
cv::solvePnPRefineLM() uses a non-linear Levenberg-Marquardt minimization scheme [184] [81] and the current implementation computes the rotation update as a perturbation and not on SO(3).
cv::solvePnPRefineVVS() uses a Gauss-Newton non-linear minimization scheme [188] and with an update of the rotation part computed using the exponential map.