#include <iostream>
static void help(const char** argv)
{
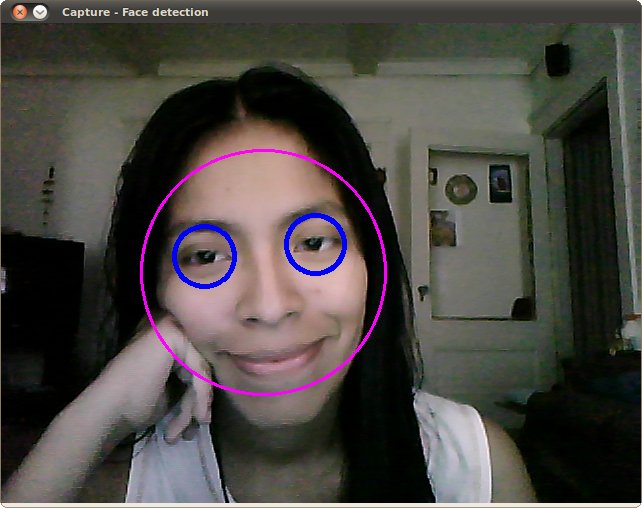
cout << "\nThis program demonstrates the use of cv::CascadeClassifier class to detect objects (Face + eyes). You can use Haar or LBP features.\n"
"This classifier can recognize many kinds of rigid objects, once the appropriate classifier is trained.\n"
"It's most known use is for faces.\n"
"Usage:\n"
<< argv[0]
<< " [--cascade=<cascade_path> this is the primary trained classifier such as frontal face]\n"
" [--nested-cascade[=nested_cascade_path this an optional secondary classifier such as eyes]]\n"
" [--scale=<image scale greater or equal to 1, try 1.3 for example>]\n"
" [--try-flip]\n"
" [filename|camera_index]\n\n"
"example:\n"
<< argv[0]
<< " --cascade=\"data/haarcascades/haarcascade_frontalface_alt.xml\" --nested-cascade=\"data/haarcascades/haarcascade_eye_tree_eyeglasses.xml\" --scale=1.3\n\n"
"During execution:\n\tHit any key to quit.\n"
"\tUsing OpenCV version " <<
CV_VERSION <<
"\n" << endl;
}
double scale, bool tryflip );
string cascadeName;
string nestedCascadeName;
int main(
int argc,
const char** argv )
{
string inputName;
bool tryflip;
double scale;
"{help h||}"
"{cascade|data/haarcascades/haarcascade_frontalface_alt.xml|}"
"{nested-cascade|data/haarcascades/haarcascade_eye_tree_eyeglasses.xml|}"
"{scale|1|}{try-flip||}{@filename||}"
);
if (parser.has("help"))
{
help(argv);
return 0;
}
cascadeName = parser.get<string>("cascade");
nestedCascadeName = parser.get<string>("nested-cascade");
scale = parser.get<
double>(
"scale");
if (scale < 1)
tryflip = parser.has("try-flip");
inputName = parser.get<string>("@filename");
if (!parser.check())
{
parser.printErrors();
return 0;
}
if (!nestedCascade.
load(samples::findFileOrKeep(nestedCascadeName)))
cerr << "WARNING: Could not load classifier cascade for nested objects" << endl;
if (!cascade.
load(samples::findFile(cascadeName)))
{
cerr << "ERROR: Could not load classifier cascade" << endl;
help(argv);
return -1;
}
if( inputName.empty() || (isdigit(inputName[0]) && inputName.size() == 1) )
{
int camera = inputName.empty() ? 0 : inputName[0] - '0';
if(!capture.
open(camera))
{
cout << "Capture from camera #" << camera << " didn't work" << endl;
return 1;
}
}
else if (!inputName.empty())
{
image =
imread(samples::findFileOrKeep(inputName), IMREAD_COLOR);
{
if (!capture.
open(samples::findFileOrKeep(inputName)))
{
cout << "Could not read " << inputName << endl;
return 1;
}
}
}
else
{
image =
imread(samples::findFile(
"lena.jpg"), IMREAD_COLOR);
{
cout << "Couldn't read lena.jpg" << endl;
return 1;
}
}
{
cout << "Video capturing has been started ..." << endl;
for(;;)
{
capture >> frame;
if( frame.empty() )
break;
detectAndDraw( frame1, cascade, nestedCascade, scale, tryflip );
if( c == 27 || c == 'q' || c == 'Q' )
break;
}
}
else
{
cout << "Detecting face(s) in " << inputName << endl;
{
detectAndDraw( image, cascade, nestedCascade, scale, tryflip );
}
else if( !inputName.empty() )
{
FILE* f = fopen( inputName.c_str(), "rt" );
if( f )
{
char buf[1000+1];
while( fgets( buf, 1000, f ) )
{
int len = (int)strlen(buf);
while( len > 0 && isspace(buf[len-1]) )
len--;
buf[len] = '\0';
cout << "file " << buf << endl;
image =
imread( buf, IMREAD_COLOR );
{
detectAndDraw( image, cascade, nestedCascade, scale, tryflip );
if( c == 27 || c == 'q' || c == 'Q' )
break;
}
else
{
cerr << "Aw snap, couldn't read image " << buf << endl;
}
}
fclose(f);
}
}
}
return 0;
}
double scale, bool tryflip )
{
double t = 0;
vector<Rect> faces, faces2;
const static Scalar colors[] =
{
};
resize( gray, smallImg,
Size(), fx, fx, INTER_LINEAR_EXACT );
1.1, 2, 0
|CASCADE_SCALE_IMAGE,
if( tryflip )
{
flip(smallImg, smallImg, 1);
1.1, 2, 0
|CASCADE_SCALE_IMAGE,
for( vector<Rect>::const_iterator r = faces2.begin(); r != faces2.end(); ++r )
{
faces.push_back(
Rect(smallImg.
cols - r->x - r->width, r->y, r->width, r->height));
}
}
for ( size_t i = 0; i < faces.size(); i++ )
{
vector<Rect> nestedObjects;
int radius;
if( 0.75 < aspect_ratio && aspect_ratio < 1.3 )
{
center.x =
cvRound((r.x + r.width*0.5)*scale);
center.y =
cvRound((r.y + r.height*0.5)*scale);
radius =
cvRound((r.width + r.height)*0.25*scale);
circle( img, center, radius, color, 3, 8, 0 );
}
else
color, 3, 8, 0);
if( nestedCascade.
empty() )
continue;
smallImgROI = smallImg( r );
1.1, 2, 0
|CASCADE_SCALE_IMAGE,
for ( size_t j = 0; j < nestedObjects.size(); j++ )
{
Rect nr = nestedObjects[j];
circle( img, center, radius, color, 3, 8, 0 );
}
}
}
Cascade classifier class for object detection.
Definition objdetect.hpp:258
bool empty() const
Checks whether the classifier has been loaded.
bool load(const String &filename)
Loads a classifier from a file.
void detectMultiScale(InputArray image, std::vector< Rect > &objects, double scaleFactor=1.1, int minNeighbors=3, int flags=0, Size minSize=Size(), Size maxSize=Size())
Detects objects of different sizes in the input image. The detected objects are returned as a list of...
Designed for command line parsing.
Definition utility.hpp:890
n-dimensional dense array class
Definition mat.hpp:840
CV_NODISCARD_STD Mat clone() const
Creates a full copy of the array and the underlying data.
int cols
Definition mat.hpp:2204
bool empty() const
Returns true if the array has no elements.
Template class for 2D rectangles.
Definition types.hpp:444
_Tp x
x coordinate of the top-left corner
Definition types.hpp:487
_Tp y
y coordinate of the top-left corner
Definition types.hpp:488
_Tp width
width of the rectangle
Definition types.hpp:489
_Tp height
height of the rectangle
Definition types.hpp:490
Template class for specifying the size of an image or rectangle.
Definition types.hpp:335
Class for video capturing from video files, image sequences or cameras.
Definition videoio.hpp:786
virtual bool open(const String &filename, int apiPreference=CAP_ANY)
Opens a video file or a capturing device or an IP video stream for video capturing.
virtual bool isOpened() const
Returns true if video capturing has been initialized already.
#define CV_VERSION
Definition version.hpp:19
void flip(InputArray src, OutputArray dst, int flipCode)
Flips a 2D array around vertical, horizontal, or both axes.
int cvRound(double value)
Rounds floating-point number to the nearest integer.
Definition fast_math.hpp:200
double getTickFrequency()
Returns the number of ticks per second.
int64 getTickCount()
Returns the number of ticks.
@ circle
Definition gr_skig.hpp:62
void imshow(const String &winname, InputArray mat)
Displays an image in the specified window.
int waitKey(int delay=0)
Waits for a pressed key.
Mat imread(const String &filename, int flags=IMREAD_COLOR_BGR)
Loads an image from a file.
void cvtColor(InputArray src, OutputArray dst, int code, int dstCn=0, AlgorithmHint hint=cv::ALGO_HINT_DEFAULT)
Converts an image from one color space to another.
void rectangle(InputOutputArray img, Point pt1, Point pt2, const Scalar &color, int thickness=1, int lineType=LINE_8, int shift=0)
Draws a simple, thick, or filled up-right rectangle.
void equalizeHist(InputArray src, OutputArray dst)
Equalizes the histogram of a grayscale image.
int main(int argc, char *argv[])
Definition highgui_qt.cpp:3
void scale(cv::Mat &mat, const cv::Mat &range, const T min, const T max)
Definition quality_utils.hpp:90