#include <iostream>
Mat myShiTomasi_dst;
Mat myShiTomasi_copy;
int myShiTomasi_qualityLevel = 50;
int myHarris_qualityLevel = 50;
int max_qualityLevel = 100;
double myHarris_minVal; double myHarris_maxVal;
double myShiTomasi_minVal; double myShiTomasi_maxVal;
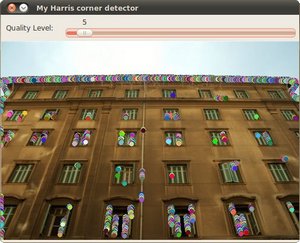
const char* myHarris_window = "My Harris corner detector";
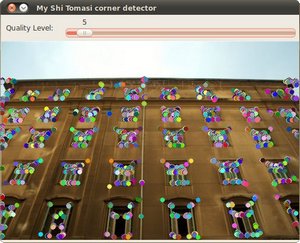
const char* myShiTomasi_window = "My Shi Tomasi corner detector";
void myShiTomasi_function( int, void* );
void myHarris_function( int, void* );
int main( int argc, char** argv )
{
CommandLineParser parser( argc, argv,
"{@input | ../data/stuff.jpg | input image}" );
{
cout << "Could not open or find the image!\n" << endl;
cout << "Usage: " << argv[0] << " <Input image>" << endl;
return -1;
}
int blockSize = 3; int apertureSize = 3;
for(
int j = 0; j < src_gray.
rows; j++ )
{
for(
int i = 0; i < src_gray.
cols; i++ )
{
float lambda_1 = myHarris_dst.
at<
Vec6f>(j, i)[0];
float lambda_2 = myHarris_dst.
at<
Vec6f>(j, i)[1];
Mc.at<
float>(j,i) = lambda_1*lambda_2 - 0.04f*
pow( ( lambda_1 + lambda_2 ), 2 );
}
}
minMaxLoc( Mc, &myHarris_minVal, &myHarris_maxVal, 0, 0,
Mat() );
createTrackbar(
" Quality Level:", myHarris_window, &myHarris_qualityLevel, max_qualityLevel, myHarris_function );
myHarris_function( 0, 0 );
minMaxLoc( myShiTomasi_dst, &myShiTomasi_minVal, &myShiTomasi_maxVal, 0, 0,
Mat() );
createTrackbar(
" Quality Level:", myShiTomasi_window, &myShiTomasi_qualityLevel, max_qualityLevel, myShiTomasi_function );
myShiTomasi_function( 0, 0 );
return(0);
}
void myShiTomasi_function( int, void* )
{
myShiTomasi_copy = src.
clone();
if( myShiTomasi_qualityLevel < 1 ) { myShiTomasi_qualityLevel = 1; }
for(
int j = 0; j < src_gray.
rows; j++ )
{
for(
int i = 0; i < src_gray.
cols; i++ )
{
if( myShiTomasi_dst.
at<
float>(j,i) > myShiTomasi_minVal + ( myShiTomasi_maxVal - myShiTomasi_minVal )*myShiTomasi_qualityLevel/max_qualityLevel )
{
circle( myShiTomasi_copy,
Point(i,j), 4,
Scalar( rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255) ), -1, 8, 0 ); }
}
}
imshow( myShiTomasi_window, myShiTomasi_copy );
}
void myHarris_function( int, void* )
{
myHarris_copy = src.
clone();
if( myHarris_qualityLevel < 1 ) { myHarris_qualityLevel = 1; }
for(
int j = 0; j < src_gray.
rows; j++ )
{
for(
int i = 0; i < src_gray.
cols; i++ )
{
if( Mc.at<float>(j,i) > myHarris_minVal + ( myHarris_maxVal - myHarris_minVal )*myHarris_qualityLevel/max_qualityLevel )
{
circle( myHarris_copy,
Point(i,j), 4,
Scalar( rng.uniform(0,255), rng.uniform(0,255), rng.uniform(0,255) ), -1, 8, 0 ); }
}
}
imshow( myHarris_window, myHarris_copy );
}
 1.8.12
1.8.12