In this text you will learn how to use opencv_dnn module using yolo_object_detection (Sample of using OpenCV dnn module in real time with device capture, video and image).
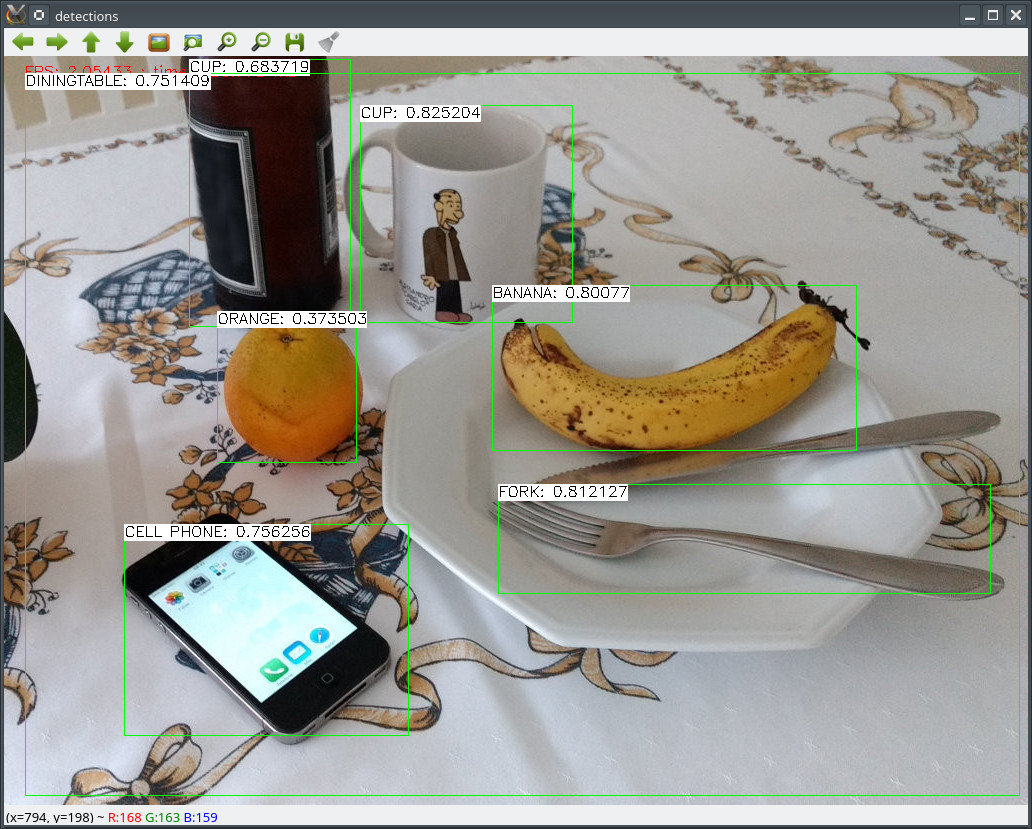
We will demonstrate results of this example on the following picture.
#include <fstream>
#include <iostream>
#include <algorithm>
#include <cstdlib>
static const char* about =
"This sample uses You only look once (YOLO)-Detector (https://arxiv.org/abs/1612.08242) to detect objects on camera/video/image.\n"
"Models can be downloaded here: https://pjreddie.com/darknet/yolo/\n"
"Default network is 416x416.\n"
"Class names can be downloaded here: https://github.com/pjreddie/darknet/tree/master/data\n";
static const char* params =
"{ help | false | print usage }"
"{ cfg | | model configuration }"
"{ model | | model weights }"
"{ camera_device | 0 | camera device number}"
"{ source | | video or image for detection}"
"{ min_confidence | 0.24 | min confidence }"
"{ class_names | | File with class names, [PATH-TO-DARKNET]/data/coco.names }";
int main(int argc, char** argv)
{
if (parser.get<bool>("help"))
{
cout << about << endl;
parser.printMessage();
return 0;
}
if (net.empty())
{
cerr << "Can't load network by using the following files: " << endl;
cerr << "cfg-file: " << modelConfiguration << endl;
cerr << "weights-file: " << modelBinary << endl;
cerr << "Models can be downloaded here:" << endl;
cerr << "https://pjreddie.com/darknet/yolo/" << endl;
exit(-1);
}
{
int cameraDevice = parser.
get<
int>(
"camera_device");
if(!cap.isOpened())
{
cout << "Couldn't find camera: " << cameraDevice << endl;
return -1;
}
}
else
{
cap.open(parser.get<
String>(
"source"));
if(!cap.isOpened())
{
cout <<
"Couldn't open image or video: " << parser.get<
String>(
"video") << endl;
return -1;
}
}
vector<string> classNamesVec;
ifstream classNamesFile(parser.get<
String>(
"class_names").
c_str());
if (classNamesFile.is_open())
{
string className = "";
while (std::getline(classNamesFile, className))
classNamesVec.push_back(className);
}
for(;;)
{
cap >> frame;
if (frame.empty())
{
break;
}
if (frame.channels() == 4)
net.setInput(inputBlob, "data");
Mat detectionMat = net.forward(
"detection_out");
vector<double> layersTimings;
double time = net.getPerfProfile(layersTimings) / freq;
ostringstream ss;
ss << "FPS: " << 1000/time << " ; time: " << time << " ms";
float confidenceThreshold = parser.get<float>("min_confidence");
for (
int i = 0; i < detectionMat.
rows; i++)
{
const int probability_index = 5;
const int probability_size = detectionMat.
cols - probability_index;
float *prob_array_ptr = &detectionMat.
at<
float>(i, probability_index);
size_t objectClass = max_element(prob_array_ptr, prob_array_ptr + probability_size) - prob_array_ptr;
float confidence = detectionMat.
at<
float>(i, (int)objectClass + probability_index);
if (confidence > confidenceThreshold)
{
float x = detectionMat.
at<
float>(i, 0);
float y = detectionMat.
at<
float>(i, 1);
float width = detectionMat.
at<
float>(i, 2);
float height = detectionMat.
at<
float>(i, 3);
int xLeftBottom = static_cast<int>((x - width / 2) * frame.cols);
int yLeftBottom = static_cast<int>((y - height / 2) * frame.rows);
int xRightTop = static_cast<int>((x + width / 2) * frame.cols);
int yRightTop = static_cast<int>((y + height / 2) * frame.rows);
Rect object(xLeftBottom, yLeftBottom,
xRightTop - xLeftBottom,
yRightTop - yLeftBottom);
if (objectClass < classNamesVec.size())
{
ss.str("");
ss << confidence;
String label =
String(classNamesVec[objectClass]) +
": " + conf;
int baseLine = 0;
}
else
{
cout << "Class: " << objectClass << endl;
cout << "Confidence: " << confidence << endl;
cout << " " << xLeftBottom
<< " " << yLeftBottom
<< " " << xRightTop
<< " " << yRightTop << endl;
}
}
}
imshow(
"YOLO: Detections", frame);
}
return 0;
}
 1.8.12
1.8.12