Goal
In this tutorial you will learn how to:
- Use the cv::DescriptorExtractor interface in order to find the feature vector correspondent to the keypoints. Specifically:
Theory
Code
This tutorial code's is shown lines below.
#include <stdio.h>
#include <iostream>
void readme();
int main( int argc, char** argv )
{
if( argc != 3 )
{ return -1; }
{ return -1; }
int minHessian = 400;
std::vector<KeyPoint> keypoints_1, keypoints_2;
Mat descriptors_1, descriptors_2;
std::vector< DMatch > matches;
matcher.match( descriptors_1, descriptors_2, matches );
drawMatches( img_1, keypoints_1, img_2, keypoints_2, matches, img_matches );
imshow(
"Matches", img_matches );
return 0;
}
void readme()
{ std::cout << " Usage: ./SURF_descriptor <img1> <img2>" << std::endl; }
Explanation
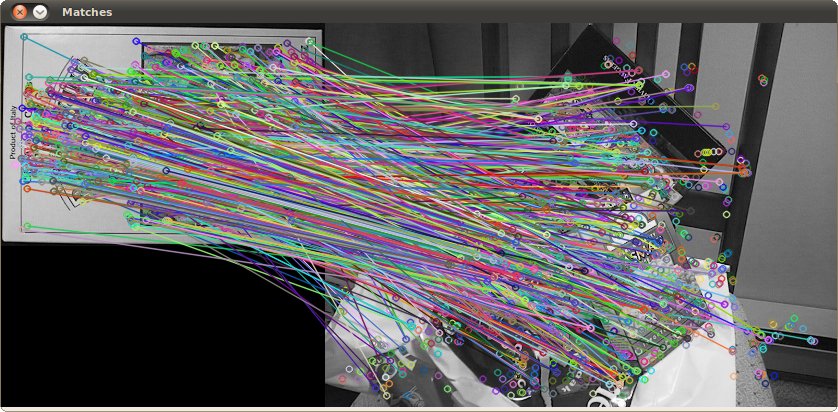
Result
Here is the result after applying the BruteForce matcher between the two original images:
 1.8.12
1.8.12