Goal
In this tutorial you will learn how to:
Theory
Hough Circle Transform
- The Hough Circle Transform works in a roughly analogous way to the Hough Line Transform explained in the previous tutorial.
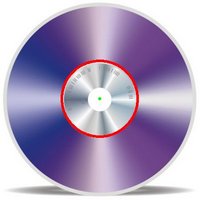
In the line detection case, a line was defined by two parameters \((r, \theta)\). In the circle case, we need three parameters to define a circle:
\[C : ( x_{center}, y_{center}, r )\]
where \((x_{center}, y_{center})\) define the center position (green point) and \(r\) is the radius, which allows us to completely define a circle, as it can be seen below:
- For sake of efficiency, OpenCV implements a detection method slightly trickier than the standard Hough Transform: The Hough gradient method, which is made up of two main stages. The first stage involves edge detection and finding the possible circle centers and the second stage finds the best radius for each candidate center. For more details, please check the book Learning OpenCV or your favorite Computer Vision bibliography
Code
- What does this program do?
- Loads an image and blur it to reduce the noise
- Applies the Hough Circle Transform to the blurred image .
- Display the detected circle in a window.
- The sample code that we will explain can be downloaded from here. A slightly fancier version (which shows trackbars for changing the threshold values) can be found here.
#include <iostream>
static void help()
{
cout << "\nThis program demonstrates circle finding with the Hough transform.\n"
"Usage:\n"
"./houghcircles <image_name>, Default is ../data/board.jpg\n" << endl;
}
int main(int argc, char** argv)
{
"{help h ||}{@image|../data/board.jpg|}"
);
if (parser.has("help"))
{
help();
return 0;
}
string filename = parser.get<string>("@image");
if (filename.empty())
{
help();
cout << "no image_name provided" << endl;
return -1;
}
{
help();
cout << "can not open " << filename << endl;
return -1;
}
vector<Vec3f> circles;
100, 30, 1, 30
);
for( size_t i = 0; i < circles.size(); i++ )
{
}
imshow(
"detected circles", cimg);
return 0;
}
Explanation
- Load an image
- Convert it to grayscale:
- Apply a Gaussian blur to reduce noise and avoid false circle detection:
- Proceed to apply Hough Circle Transform: with the arguments:
- src_gray: Input image (grayscale).
- circles: A vector that stores sets of 3 values: \(x_{c}, y_{c}, r\) for each detected circle.
- HOUGH_GRADIENT: Define the detection method. Currently this is the only one available in OpenCV.
- dp = 1: The inverse ratio of resolution.
- min_dist = src_gray.rows/8: Minimum distance between detected centers.
- param_1 = 200: Upper threshold for the internal Canny edge detector.
- param_2 = 100*: Threshold for center detection.
- min_radius = 0: Minimum radio to be detected. If unknown, put zero as default.
- max_radius = 0: Maximum radius to be detected. If unknown, put zero as default.
- Draw the detected circles:
for( size_t i = 0; i < circles.size(); i++ )
{
int radius =
cvRound(circles[i][2]);
}
- Display the detected circle(s):
imshow(
"Hough Circle Transform Demo", src );
- Wait for the user to exit the program
Result
The result of running the code above with a test image is shown below:

 1.8.9.1
1.8.9.1

