To do the tracking we need a video and object position on the first frame.
To run the code you have to specify input and output video path and object bounding box.
3 #include <opencv2/opencv.hpp>
14 const double akaze_thresh = 3e-4;
15 const double ransac_thresh = 2.5f;
16 const double nn_match_ratio = 0.8f;
17 const int bb_min_inliers = 100;
18 const int stats_update_period = 10;
28 void setFirstFrame(
const Mat frame, vector<Point2f> bb,
string title, Stats& stats);
29 Mat process(
const Mat frame, Stats& stats);
36 Mat first_frame, first_desc;
37 vector<KeyPoint> first_kp;
38 vector<Point2f> object_bb;
41 void Tracker::setFirstFrame(
const Mat frame, vector<Point2f> bb,
string title, Stats& stats)
43 first_frame = frame.
clone();
45 stats.keypoints = (int)first_kp.size();
46 drawBoundingBox(first_frame, bb);
51 Mat Tracker::process(
const Mat frame, Stats& stats)
56 stats.keypoints = (int)kp.size();
58 vector< vector<DMatch> > matches;
59 vector<KeyPoint> matched1, matched2;
60 matcher->knnMatch(first_desc, desc, matches, 2);
61 for(
unsigned i = 0; i < matches.size(); i++) {
62 if(matches[i][0].distance < nn_match_ratio * matches[i][1].distance) {
63 matched1.push_back(first_kp[matches[i][0].queryIdx]);
64 matched2.push_back( kp[matches[i][0].trainIdx]);
67 stats.matches = (int)matched1.size();
69 Mat inlier_mask, homography;
70 vector<KeyPoint> inliers1, inliers2;
71 vector<DMatch> inlier_matches;
72 if(matched1.size() >= 4) {
74 RANSAC, ransac_thresh, inlier_mask);
77 if(matched1.size() < 4 || homography.
empty()) {
79 hconcat(first_frame, frame, res);
84 for(
unsigned i = 0; i < matched1.size(); i++) {
86 int new_i =
static_cast<int>(inliers1.size());
87 inliers1.push_back(matched1[i]);
88 inliers2.push_back(matched2[i]);
89 inlier_matches.push_back(
DMatch(new_i, new_i, 0));
92 stats.inliers = (int)inliers1.size();
93 stats.ratio = stats.inliers * 1.0 / stats.matches;
95 vector<Point2f> new_bb;
98 if(stats.inliers >= bb_min_inliers) {
99 drawBoundingBox(frame_with_bb, new_bb);
102 drawMatches(first_frame, inliers1, frame_with_bb, inliers2,
108 int main(
int argc,
char **argv)
111 cerr <<
"Usage: " << endl <<
112 "akaze_track input_path output_path bounding_box" << endl;
122 if(!video_in.isOpened()) {
123 cerr <<
"Couldn't open " << argv[1] << endl;
126 if(!video_out.isOpened()) {
127 cerr <<
"Couldn't open " << argv[2] << endl;
133 if(fs[
"bounding_box"].empty()) {
134 cerr <<
"Couldn't read bounding_box from " << argv[3] << endl;
137 fs[
"bounding_box"] >> bb;
139 Stats stats, akaze_stats, orb_stats;
145 Tracker akaze_tracker(akaze, matcher);
146 Tracker orb_tracker(orb, matcher);
150 akaze_tracker.setFirstFrame(frame, bb,
"AKAZE", stats);
151 orb_tracker.setFirstFrame(frame, bb,
"ORB", stats);
153 Stats akaze_draw_stats, orb_draw_stats;
155 Mat akaze_res, orb_res, res_frame;
156 for(
int i = 1; i < frame_count; i++) {
157 bool update_stats = (i % stats_update_period == 0);
160 akaze_res = akaze_tracker.process(frame, stats);
161 akaze_stats += stats;
163 akaze_draw_stats = stats;
167 orb_res = orb_tracker.process(frame, stats);
170 orb_draw_stats = stats;
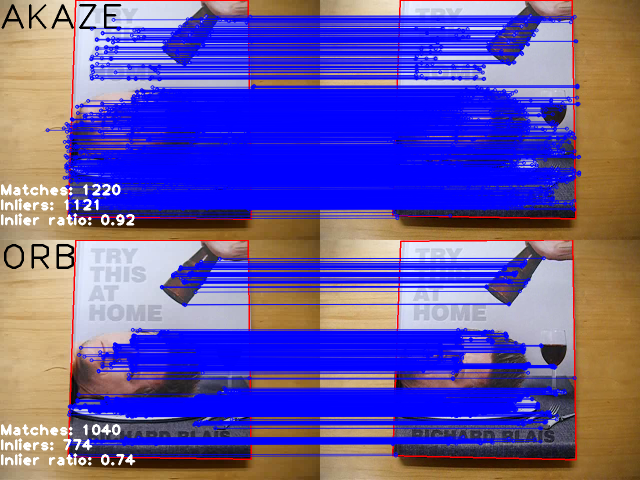
173 drawStatistics(akaze_res, akaze_draw_stats);
174 drawStatistics(orb_res, orb_draw_stats);
175 vconcat(akaze_res, orb_res, res_frame);
176 video_out << res_frame;
177 cout << i <<
"/" << frame_count - 1 << endl;
179 akaze_stats /= frame_count - 1;
180 orb_stats /= frame_count - 1;
181 printStatistics(
"AKAZE", akaze_stats);
182 printStatistics(
"ORB", orb_stats);
bool empty() const
Returns true if the array has no elements.
Scalar_< double > Scalar
Definition: types.hpp:597
Definition: videoio.hpp:100
void drawMatches(InputArray img1, const std::vector< KeyPoint > &keypoints1, InputArray img2, const std::vector< KeyPoint > &keypoints2, const std::vector< DMatch > &matches1to2, InputOutputArray outImg, const Scalar &matchColor=Scalar::all(-1), const Scalar &singlePointColor=Scalar::all(-1), const std::vector< char > &matchesMask=std::vector< char >(), int flags=DrawMatchesFlags::DEFAULT)
Draws the found matches of keypoints from two images.
Video writer class.
Definition: videoio.hpp:598
Definition: videoio.hpp:99
Base abstract class for the long-term tracker:
Definition: tracker.hpp:529
Class for video capturing from video files, image sequences or cameras. The class provides C++ API fo...
Definition: videoio.hpp:429
virtual void setMaxFeatures(int maxFeatures)=0
void vconcat(const Mat *src, size_t nsrc, OutputArray dst)
Applies vertical concatenation to given matrices.
Definition: videoio.hpp:97
InputOutputArray noArray()
Mat clone() const
Creates a full copy of the array and the underlying data.
RANSAC algorithm.
Definition: calib3d.hpp:187
XML/YAML file storage class that encapsulates all the information necessary for writing or reading da...
Definition: persistence.hpp:298
unsigned char uchar
Definition: defs.h:284
Template class for smart pointers with shared ownership.
Definition: cvstd.hpp:283
Size2i Size
Definition: types.hpp:308
Definition: videoio.hpp:101
virtual void detectAndCompute(InputArray image, InputArray mask, std::vector< KeyPoint > &keypoints, OutputArray descriptors, bool useProvidedKeypoints=false)
virtual void setThreshold(double threshold)=0
Mat findHomography(InputArray srcPoints, InputArray dstPoints, int method=0, double ransacReprojThreshold=3, OutputArray mask=noArray(), const int maxIters=2000, const double confidence=0.995)
Finds a perspective transformation between two planes.
Definition: videoio.hpp:98
void hconcat(const Mat *src, size_t nsrc, OutputArray dst)
Applies horizontal concatenation to given matrices.
void putText(InputOutputArray img, const String &text, Point org, int fontFace, double fontScale, Scalar color, int thickness=1, int lineType=LINE_8, bool bottomLeftOrigin=false)
Draws a text string.
small size sans-serif font
Definition: core.hpp:214
int main(int argc, const char *argv[])
Definition: facerec_demo.cpp:67
n-dimensional dense array class
Definition: mat.hpp:726
_Tp & at(int i0=0)
Returns a reference to the specified array element.
Class for matching keypoint descriptors.
Definition: types.hpp:728
Point2i Point
Definition: types.hpp:181
void perspectiveTransform(InputArray src, OutputArray dst, InputArray m)
Performs the perspective matrix transformation of vectors.
This class implements algorithm described abobve using given feature detector and descriptor matcher.


 1.8.7
1.8.7