The tutorial demonstrates the Intel® IPP Asynchronous C/C++ library usage with OpenCV. The code example below illustrates implementation of the Sobel operation, accelerated with Intel® IPP Asynchronous C/C++ functions. In this code example, hpp::getMat and hpp::getHpp functions are used for data conversion between hppiMatrix and Mat matrices.
You may also find the source code in the samples/cpp/tutorial_code/core/ippasync/ippasync_sample.cpp file of the OpenCV source library or download it from here.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 | #include <stdio.h>
#include "opencv2/core/utility.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "cvconfig.h"
using namespace std;
using namespace cv;
#ifdef HAVE_IPP_A
#include "opencv2/core/ippasync.hpp"
#define CHECK_STATUS(STATUS, NAME)\
if(STATUS!=HPP_STATUS_NO_ERROR){ printf("%s error %d\n", NAME, STATUS);\
if (virtMatrix) {hppStatus delSts = hppiDeleteVirtualMatrices(accel, virtMatrix); CHECK_DEL_STATUS(delSts,"hppiDeleteVirtualMatrices");}\
if (accel) {hppStatus delSts = hppDeleteInstance(accel); CHECK_DEL_STATUS(delSts, "hppDeleteInstance");}\
return -1;}
#define CHECK_DEL_STATUS(STATUS, NAME)\
if(STATUS!=HPP_STATUS_NO_ERROR){ printf("%s error %d\n", NAME, STATUS); return -1;}
#endif
static void help()
{
printf("\nThis program shows how to use the conversion for IPP Async.\n"
"This example uses the Sobel filter.\n"
"You can use cv::Sobel or hppiSobel.\n"
"Usage: \n"
"./ipp_async_sobel [--camera]=<use camera,if this key is present>, \n"
" [--file_name]=<path to movie or image file>\n"
" [--accel]=<accelerator type: auto (default), cpu, gpu>\n\n");
}
const char* keys =
{
"{c camera | | use camera or not}"
"{fn file_name|../data/baboon.jpg | image file }"
"{a accel |auto | accelerator type: auto (default), cpu, gpu}"
};
//this is a sample for hppiSobel functions
int main(int argc, const char** argv)
{
help();
VideoCapture cap;
CommandLineParser parser(argc, argv, keys);
Mat image, gray, result;
#ifdef HAVE_IPP_A
hppiMatrix* src,* dst;
hppAccel accel = 0;
hppAccelType accelType;
hppStatus sts;
hppiVirtualMatrix * virtMatrix;
bool useCamera = parser.has("camera");
string file = parser.get<string>("file_name");
string sAccel = parser.get<string>("accel");
parser.printMessage();
if( useCamera )
{
printf("used camera\n");
cap.open(0);
}
else
{
printf("used image %s\n", file.c_str());
cap.open(file.c_str());
}
if( !cap.isOpened() )
{
printf("can not open camera or video file\n");
return -1;
}
accelType = sAccel == "cpu" ? HPP_ACCEL_TYPE_CPU:
sAccel == "gpu" ? HPP_ACCEL_TYPE_GPU:
HPP_ACCEL_TYPE_ANY;
//Create accelerator instance
sts = hppCreateInstance(accelType, 0, &accel);
CHECK_STATUS(sts, "hppCreateInstance");
accelType = hppQueryAccelType(accel);
sAccel = accelType == HPP_ACCEL_TYPE_CPU ? "cpu":
accelType == HPP_ACCEL_TYPE_GPU ? "gpu":
accelType == HPP_ACCEL_TYPE_GPU_VIA_DX9 ? "gpu dx9": "?";
printf("accelType %s\n", sAccel.c_str());
virtMatrix = hppiCreateVirtualMatrices(accel, 1);
for(;;)
{
cap >> image;
if(image.empty())
break;
cvtColor( image, gray, COLOR_BGR2GRAY );
result.create( image.rows, image.cols, CV_8U);
double execTime = (double)getTickCount();
//convert Mat to hppiMatrix
src = hpp::getHpp(gray,accel);
dst = hpp::getHpp(result,accel);
sts = hppiSobel(accel,src, HPP_MASK_SIZE_3X3,HPP_NORM_L1,virtMatrix[0]);
CHECK_STATUS(sts,"hppiSobel");
sts = hppiConvert(accel, virtMatrix[0], 0, HPP_RND_MODE_NEAR, dst, HPP_DATA_TYPE_8U);
CHECK_STATUS(sts,"hppiConvert");
// Wait for tasks to complete
sts = hppWait(accel, HPP_TIME_OUT_INFINITE);
CHECK_STATUS(sts, "hppWait");
execTime = ((double)getTickCount() - execTime)*1000./getTickFrequency();
printf("Time : %0.3fms\n", execTime);
imshow("image", image);
imshow("rez", result);
waitKey(15);
sts = hppiFreeMatrix(src);
CHECK_DEL_STATUS(sts,"hppiFreeMatrix");
sts = hppiFreeMatrix(dst);
CHECK_DEL_STATUS(sts,"hppiFreeMatrix");
}
if (!useCamera)
waitKey(0);
if (virtMatrix)
{
sts = hppiDeleteVirtualMatrices(accel, virtMatrix);
CHECK_DEL_STATUS(sts,"hppiDeleteVirtualMatrices");
}
if (accel)
{
sts = hppDeleteInstance(accel);
CHECK_DEL_STATUS(sts, "hppDeleteInstance");
}
printf("SUCCESS\n");
#else
printf("IPP Async not supported\n");
#endif
return 0;
}
|
Create parameters for OpenCV:
VideoCapture cap;
Mat image, gray, result;
and IPP Async:
hppiMatrix* src,* dst;
hppAccel accel = 0;
hppAccelType accelType;
hppStatus sts;
hppiVirtualMatrix * virtMatrix;
Load input image or video. How to open and read video stream you can see in the Video Input with OpenCV and similarity measurement tutorial.
if( useCamera )
{
printf("used camera\n");
cap.open(0);
}
else
{
printf("used image %s\n", file.c_str());
cap.open(file.c_str());
}
if( !cap.isOpened() )
{
printf("can not open camera or video file\n");
return -1;
}
Create accelerator instance using hppCreateInstance:
accelType = sAccel == "cpu" ? HPP_ACCEL_TYPE_CPU:
sAccel == "gpu" ? HPP_ACCEL_TYPE_GPU:
HPP_ACCEL_TYPE_ANY;
//Create accelerator instance
sts = hppCreateInstance(accelType, 0, &accel);
CHECK_STATUS(sts, "hppCreateInstance");
Create an array of virtual matrices using hppiCreateVirtualMatrices function.
virtMatrix = hppiCreateVirtualMatrices(accel, 1);
Prepare a matrix for input and output data:
cap >> image;
if(image.empty())
break;
cvtColor( image, gray, COLOR_BGR2GRAY );
result.create( image.rows, image.cols, CV_8U);
Convert Mat to hppiMatrix using getHpp and call hppiSobel function.
//convert Mat to hppiMatrix
src = getHpp(gray, accel);
dst = getHpp(result, accel);
sts = hppiSobel(accel,src, HPP_MASK_SIZE_3X3,HPP_NORM_L1,virtMatrix[0]);
CHECK_STATUS(sts,"hppiSobel");
sts = hppiConvert(accel, virtMatrix[0], 0, HPP_RND_MODE_NEAR, dst, HPP_DATA_TYPE_8U);
CHECK_STATUS(sts,"hppiConvert");
// Wait for tasks to complete
sts = hppWait(accel, HPP_TIME_OUT_INFINITE);
CHECK_STATUS(sts, "hppWait");
We use hppiConvert because hppiSobel returns destination matrix with HPP_DATA_TYPE_16S data type for source matrix with HPP_DATA_TYPE_8U type. You should check hppStatus after each call IPP Async function.
Create windows and show the images, the usual way.
imshow("image", image);
imshow("rez", result);
waitKey(15);
Delete hpp matrices.
sts = hppiFreeMatrix(src);
CHECK_DEL_STATUS(sts,"hppiFreeMatrix");
sts = hppiFreeMatrix(dst);
CHECK_DEL_STATUS(sts,"hppiFreeMatrix");
Delete virtual matrices and accelerator instance.
if (virtMatrix)
{
sts = hppiDeleteVirtualMatrices(accel, virtMatrix);
CHECK_DEL_STATUS(sts,"hppiDeleteVirtualMatrices");
}
if (accel)
{
sts = hppDeleteInstance(accel);
CHECK_DEL_STATUS(sts, "hppDeleteInstance");
}
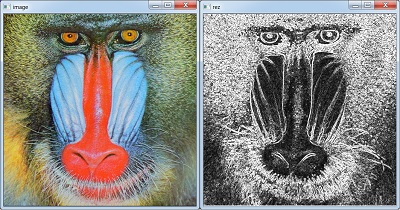
After compiling the code above we can execute it giving an image or video path and accelerator type as an argument. For this tutorial we use baboon.png image as input. The result is below.