Canny Edge Detector¶
Goal¶
In this tutorial you will learn how to:
- Use the OpenCV function Canny to implement the Canny Edge Detector.
Theory¶
- The Canny Edge detector was developed by John F. Canny in 1986. Also known to many as the optimal detector, Canny algorithm aims to satisfy three main criteria:
- Low error rate: Meaning a good detection of only existent edges.
- Good localization: The distance between edge pixels detected and real edge pixels have to be minimized.
- Minimal response: Only one detector response per edge.
Steps¶
Filter out any noise. The Gaussian filter is used for this purpose. An example of a Gaussian kernel of
 that might be used is shown below:
that might be used is shown below: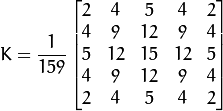
Find the intensity gradient of the image. For this, we follow a procedure analogous to Sobel:
Apply a pair of convolution masks (in
 and
and  directions:
directions: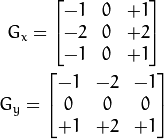
Find the gradient strength and direction with:
The direction is rounded to one of four possible angles (namely 0, 45, 90 or 135)
Non-maximum suppression is applied. This removes pixels that are not considered to be part of an edge. Hence, only thin lines (candidate edges) will remain.
Hysteresis: The final step. Canny does use two thresholds (upper and lower):
- If a pixel gradient is higher than the upper threshold, the pixel is accepted as an edge
- If a pixel gradient value is below the lower threshold, then it is rejected.
- If the pixel gradient is between the two thresholds, then it will be accepted only if it is connected to a pixel that is above the upper threshold.
Canny recommended a upper:lower ratio between 2:1 and 3:1.
For more details, you can always consult your favorite Computer Vision book.
Code¶
- What does this program do?
- Asks the user to enter a numerical value to set the lower threshold for our Canny Edge Detector (by means of a Trackbar)
- Applies the Canny Detector and generates a mask (bright lines representing the edges on a black background).
- Applies the mask obtained on the original image and display it in a window.
- The tutorial code’s is shown lines below. You can also download it from here
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdlib.h>
#include <stdio.h>
using namespace cv;
/// Global variables
Mat src, src_gray;
Mat dst, detected_edges;
int edgeThresh = 1;
int lowThreshold;
int const max_lowThreshold = 100;
int ratio = 3;
int kernel_size = 3;
char* window_name = "Edge Map";
/**
* @function CannyThreshold
* @brief Trackbar callback - Canny thresholds input with a ratio 1:3
*/
void CannyThreshold(int, void*)
{
/// Reduce noise with a kernel 3x3
blur( src_gray, detected_edges, Size(3,3) );
/// Canny detector
Canny( detected_edges, detected_edges, lowThreshold, lowThreshold*ratio, kernel_size );
/// Using Canny's output as a mask, we display our result
dst = Scalar::all(0);
src.copyTo( dst, detected_edges);
imshow( window_name, dst );
}
/** @function main */
int main( int argc, char** argv )
{
/// Load an image
src = imread( argv[1] );
if( !src.data )
{ return -1; }
/// Create a matrix of the same type and size as src (for dst)
dst.create( src.size(), src.type() );
/// Convert the image to grayscale
cvtColor( src, src_gray, CV_BGR2GRAY );
/// Create a window
namedWindow( window_name, CV_WINDOW_AUTOSIZE );
/// Create a Trackbar for user to enter threshold
createTrackbar( "Min Threshold:", window_name, &lowThreshold, max_lowThreshold, CannyThreshold );
/// Show the image
CannyThreshold(0, 0);
/// Wait until user exit program by pressing a key
waitKey(0);
return 0;
}
Explanation¶
Create some needed variables:
Mat src, src_gray; Mat dst, detected_edges; int edgeThresh = 1; int lowThreshold; int const max_lowThreshold = 100; int ratio = 3; int kernel_size = 3; char* window_name = "Edge Map"; Note the following: a. We establish a ratio of lower:upper threshold of 3:1 (with the variable *ratio*) b. We set the kernel size of :math:`3` (for the Sobel operations to be performed internally by the Canny function) c. We set a maximum value for the lower Threshold of :math:`100`.
Loads the source image:
/// Load an image src = imread( argv[1] ); if( !src.data ) { return -1; }
Create a matrix of the same type and size of src (to be dst)
dst.create( src.size(), src.type() );
Convert the image to grayscale (using the function cvtColor:
cvtColor( src, src_gray, CV_BGR2GRAY );
Create a window to display the results
namedWindow( window_name, CV_WINDOW_AUTOSIZE );
Create a Trackbar for the user to enter the lower threshold for our Canny detector:
createTrackbar( "Min Threshold:", window_name, &lowThreshold, max_lowThreshold, CannyThreshold );
Observe the following:
- The variable to be controlled by the Trackbar is lowThreshold with a limit of max_lowThreshold (which we set to 100 previously)
- Each time the Trackbar registers an action, the callback function CannyThreshold will be invoked.
Let’s check the CannyThreshold function, step by step:
First, we blur the image with a filter of kernel size 3:
blur( src_gray, detected_edges, Size(3,3) );
Second, we apply the OpenCV function Canny:
Canny( detected_edges, detected_edges, lowThreshold, lowThreshold*ratio, kernel_size );
where the arguments are:
- detected_edges: Source image, grayscale
- detected_edges: Output of the detector (can be the same as the input)
- lowThreshold: The value entered by the user moving the Trackbar
- highThreshold: Set in the program as three times the lower threshold (following Canny’s recommendation)
- kernel_size: We defined it to be 3 (the size of the Sobel kernel to be used internally)
We fill a dst image with zeros (meaning the image is completely black).
dst = Scalar::all(0);
Finally, we will use the function copyTo to map only the areas of the image that are identified as edges (on a black background).
src.copyTo( dst, detected_edges);
copyTo copy the src image onto dst. However, it will only copy the pixels in the locations where they have non-zero values. Since the output of the Canny detector is the edge contours on a black background, the resulting dst will be black in all the area but the detected edges.
We display our result:
imshow( window_name, dst );
Result¶
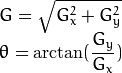
After compiling the code above, we can run it giving as argument the path to an image. For example, using as an input the following image:
Moving the slider, trying different threshold, we obtain the following result:
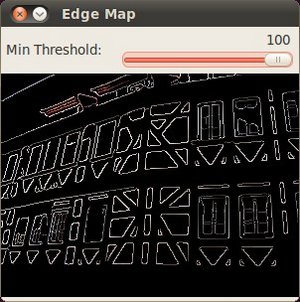
Notice how the image is superposed to the black background on the edge regions.
Help and Feedback
You did not find what you were looking for?- Ask a question in the user group/mailing list.
- If you think something is missing or wrong in the documentation, please file a bug report.