To do the tracking we need a video and object position on the first frame.
To run the code you have to specify input and output video path and object bounding box.
#include <opencv2/opencv.hpp>
#include <vector>
#include <iostream>
#include <iomanip>
#include "stats.h"
#include "utils.h"
const double akaze_thresh = 3e-4;
const double ransac_thresh = 2.5f;
const double nn_match_ratio = 0.8f;
const int bb_min_inliers = 100;
const int stats_update_period = 10;
{
public:
detector(_detector),
matcher(_matcher)
{}
void setFirstFrame(
const Mat frame, vector<Point2f> bb,
string title, Stats& stats);
Mat process(
const Mat frame, Stats& stats);
return detector;
}
protected:
Mat first_frame, first_desc;
vector<KeyPoint> first_kp;
vector<Point2f> object_bb;
};
void Tracker::setFirstFrame(
const Mat frame, vector<Point2f> bb,
string title, Stats& stats)
{
first_frame = frame.
clone();
stats.keypoints = (int)first_kp.size();
drawBoundingBox(first_frame, bb);
object_bb = bb;
}
Mat Tracker::process(
const Mat frame, Stats& stats)
{
vector<KeyPoint> kp;
stats.keypoints = (int)kp.size();
vector< vector<DMatch> > matches;
vector<KeyPoint> matched1, matched2;
matcher->knnMatch(first_desc, desc, matches, 2);
for(unsigned i = 0; i < matches.size(); i++) {
if(matches[i][0].distance < nn_match_ratio * matches[i][1].distance) {
matched1.push_back(first_kp[matches[i][0].queryIdx]);
matched2.push_back( kp[matches[i][0].trainIdx]);
}
}
stats.matches = (int)matched1.size();
Mat inlier_mask, homography;
vector<KeyPoint> inliers1, inliers2;
vector<DMatch> inlier_matches;
if(matched1.size() >= 4) {
RANSAC, ransac_thresh, inlier_mask);
}
if(matched1.size() < 4 || homography.
empty()) {
stats.inliers = 0;
stats.ratio = 0;
return res;
}
for(unsigned i = 0; i < matched1.size(); i++) {
int new_i = static_cast<int>(inliers1.size());
inliers1.push_back(matched1[i]);
inliers2.push_back(matched2[i]);
inlier_matches.push_back(
DMatch(new_i, new_i, 0));
}
}
stats.inliers = (int)inliers1.size();
stats.ratio = stats.inliers * 1.0 / stats.matches;
vector<Point2f> new_bb;
if(stats.inliers >= bb_min_inliers) {
drawBoundingBox(frame_with_bb, new_bb);
}
drawMatches(first_frame, inliers1, frame_with_bb, inliers2,
inlier_matches, res,
return res;
}
int main(int argc, char **argv)
{
if(argc < 4) {
cerr << "Usage: " << endl <<
"akaze_track input_path output_path bounding_box" << endl;
return 1;
}
if(!video_in.isOpened()) {
cerr << "Couldn't open " << argv[1] << endl;
return 1;
}
if(!video_out.isOpened()) {
cerr << "Couldn't open " << argv[2] << endl;
return 1;
}
vector<Point2f> bb;
if(fs["bounding_box"].empty()) {
cerr << "Couldn't read bounding_box from " << argv[3] << endl;
return 1;
}
fs["bounding_box"] >> bb;
Stats stats, akaze_stats, orb_stats;
Tracker akaze_tracker(akaze, matcher);
video_in >> frame;
akaze_tracker.setFirstFrame(frame, bb, "AKAZE", stats);
orb_tracker.setFirstFrame(frame, bb, "ORB", stats);
Stats akaze_draw_stats, orb_draw_stats;
Mat akaze_res, orb_res, res_frame;
for(int i = 1; i < frame_count; i++) {
bool update_stats = (i % stats_update_period == 0);
video_in >> frame;
akaze_res = akaze_tracker.process(frame, stats);
akaze_stats += stats;
if(update_stats) {
akaze_draw_stats = stats;
}
orb_res = orb_tracker.process(frame, stats);
orb_stats += stats;
if(update_stats) {
orb_draw_stats = stats;
}
drawStatistics(akaze_res, akaze_draw_stats);
drawStatistics(orb_res, orb_draw_stats);
vconcat(akaze_res, orb_res, res_frame);
video_out << res_frame;
cout << i << "/" << frame_count - 1 << endl;
}
akaze_stats /= frame_count - 1;
orb_stats /= frame_count - 1;
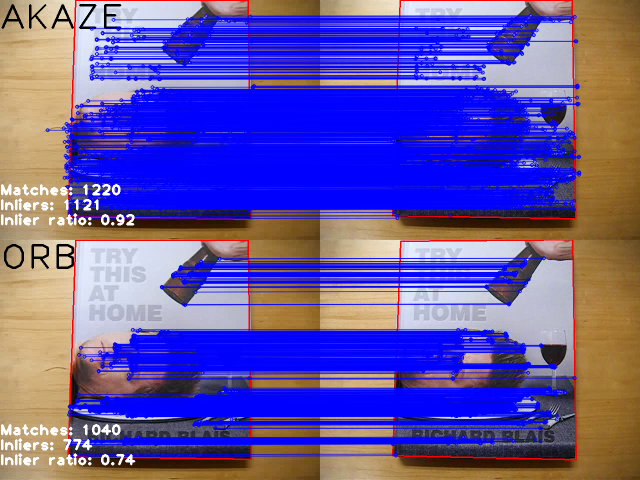
printStatistics("AKAZE", akaze_stats);
printStatistics("ORB", orb_stats);
return 0;
}
This class implements algorithm described abobve using given feature detector and descriptor matcher.
 1.8.9.1
1.8.9.1

